
摘 要: 为检测滚动直线导轨副滑块内滚道的位置、圆弧半径,提出了一种基于激光位移传感器测距的滑块内滚道的检测方法,该方法将激光位移传感器相对内轨道轴线以一定角度倾斜,通过扫描内滚道轮廓得出一个半椭圆轮廓,以最小二乘法进行椭圆拟合。通过数学分析,内滚道位置和半径大小可以转化为拟合椭圆的形心位置和椭圆的短轴长。通过对高精度圆柱做等效验证试验,验证了测量方案的可行性,最后进行了多方面的误差分析。
关键词: 滑块内滚道; 位置; 半径; 椭圆拟合; 验证试验
滑块作为滚动直线导轨副的一个重要构件,对导轨副有着重要的影响,而滑块内滚道的型面误差直接影响导轨副的摩擦磨损、精度保持、寿命、刚性以及震动噪音等[1-5]。从提高国内滚动直线导轨副的产品性能出发,很有必要对滚动直线导轨副的内滚道型面精度进行检测。
滚动直线导轨副的滑块内轨道的位置以及半径测量方法主要有投影仪目测观察测量以及自动测量两种。投影检测,这种方法成本低,但不能实时测出内滚道的数据,只能和设定尺寸的图纸,进行同等倍数放大对比;而自动测量主要采用的是三坐标测仪,三 坐标测量仪测量精度高,但价格昂贵。
本文提出一种基于激光位移传感器的滑块内滚道位置以及半径大小测量方法,通过将激光位移传感器测量方向与滑块内滚道轴线保持非垂直的状态,倾斜安装,测量滑块内滚道轮廓,采集内滚道数据,得出滑块四条滚道相对侧面基准与底面基准的位置以及相应的滚道半径;通过倾斜安装的方式将传感器置于滑块两跨的外部,避免了小空间对传感器选型的限制,同时对倾斜测量的方式进行了大量的实验,证明了本方法的可行性与稳定性。
1 滑块型面检测指标
滑块的检测内容如图1所示,包括:① 滑块上基准面A的平面度t1;② 侧基准面B的平面度t2;③ 滑块宽度B1;④ 四条内滚道相对基准面A、B的平行度以及相应的滚道半径。
图2(左)所示为测量系统传感器布局图,图2(右)为其正视图。测量传感器均为Keyence公司的超高速/高精度CMOS激光位移传感器LK-5000系列。其中传感器1、2、3、4、5的型号为LK-H020,传感器6、7的型号为LK-H050。传感器在后续示意图均用“▲”表示。
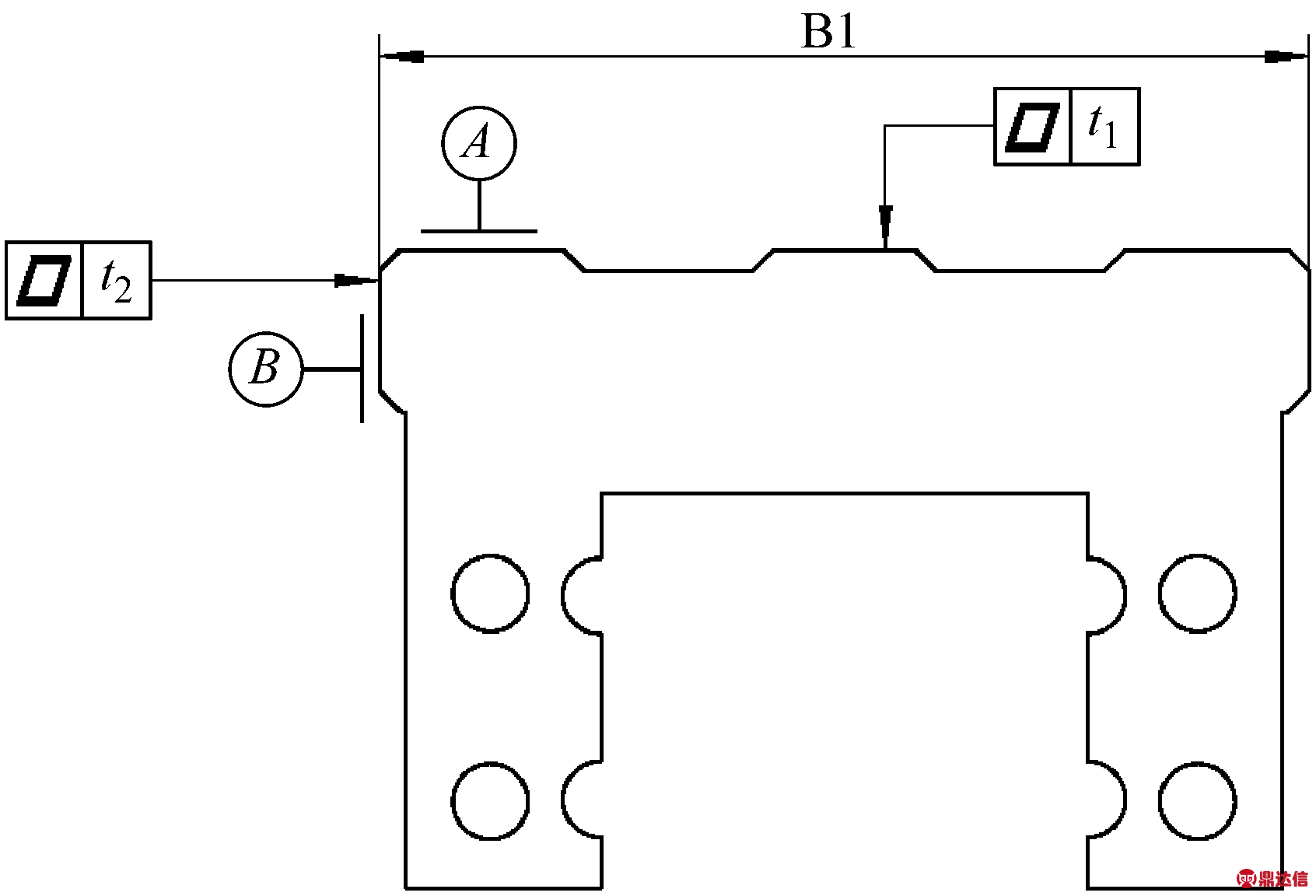
图1 测量元素示意图
Fig.1 Schematic diagram of the measured element


图2 传感器布局图
Fig.2 Sensor layout
传感器1、2与3相对分布于滑块侧面两端,测量基准面B的平面度t2和滑块宽度B1;传感器4、5测出基准面A的平面度t1。传感器6、7采用倾斜安装的方式,倾斜角度为α,测量出滑块内滚道某一斜截面相对基准的位置以及相应斜截面滚道半径。
2 测量方法
测量过程如图3所示。首先对标定块进行测量,如图3(左)所示。标定块正确安装在夹具上,传感器1、2、3、4、5所在的测量架沿着Y轴方向运动,采集滑块型面数据,传感器6、7所在测量架沿着Z轴方向运动采集内滚道数据,将此时传感器测量值作归零处理,则后续测出的值都是相对于夹具坐标系。运动平台拟采用气浮,气浮平台的运动精度重复性以及传感器的性能将在第4部分详述。图3(右)为测量待测件。测量过程为传感器1、2、3、4、5所在的测量架沿着Y轴方向运动,并由光栅尺测出实时位移,传感器在测量架上位置通过安装时确定,传感器1、2、3、4、5实时测出所在测量方向上的位移,传感器6、7所在的测量架沿着Z轴方向运动采集滑块内滚道某一截面数据,通过对不同截面数据的提取求出滑块内滚道相对基准面的平行度,以及自身的半径测量。


图3 测量示意图
Fig.3 Schematic diagram of measurement
2.1 型面精度的检测算法
传感器4、5在沿着Y轴方向运动时,可以测出一系列坐标值xi,yi,zi,其中xi值由传感器在实验台上安装位置唯一确定,yi由光栅尺读出,zi通过激光位移传感器实时读出。通过选择滑块待测基准面上一些具有代表性的截面数据来间接反映基准面的平面度[6],设平面方程为A1x+B1y+C1=z,由文献[7]采用最小二乘法拟合基准面A,可得基准面A平面度最小二乘法评定结果为:
t1=![]()

(1)
同理可以得基准面B平面度的最小二乘法评定结果为:
t2=![]()
(2)
基准面A的方向向量:

(3)
基准面B的方向向量:
(4)
基准面B相对基准面A的夹角表示为:
(5)
理想内滚道轴线与两基准面交线平行,其方向向量可以表示为:
(6)
滑块的基准面B与夹具侧边的夹角为:
(7)
滑块基准面B的待测点在X轴方向上到夹具坐标系的距离为:
xh=
(8)
与基准面相对的面在X方向上到夹具坐标系的距离为:
xv=L-![]()
(9)
其中L为标定块宽度
则滑块宽度为:
B1=(xv-xh)cos θ
(10)
2.2 内滚道检测
2.2.1 内滚道位置与半径算法的理论依据
对任意一个标准圆柱进行剖切,一定能得到一个圆截面(垂直于轴线扫),或者是一个椭圆截面(非垂直轴线扫),情形如图4所示,共有如下三种。
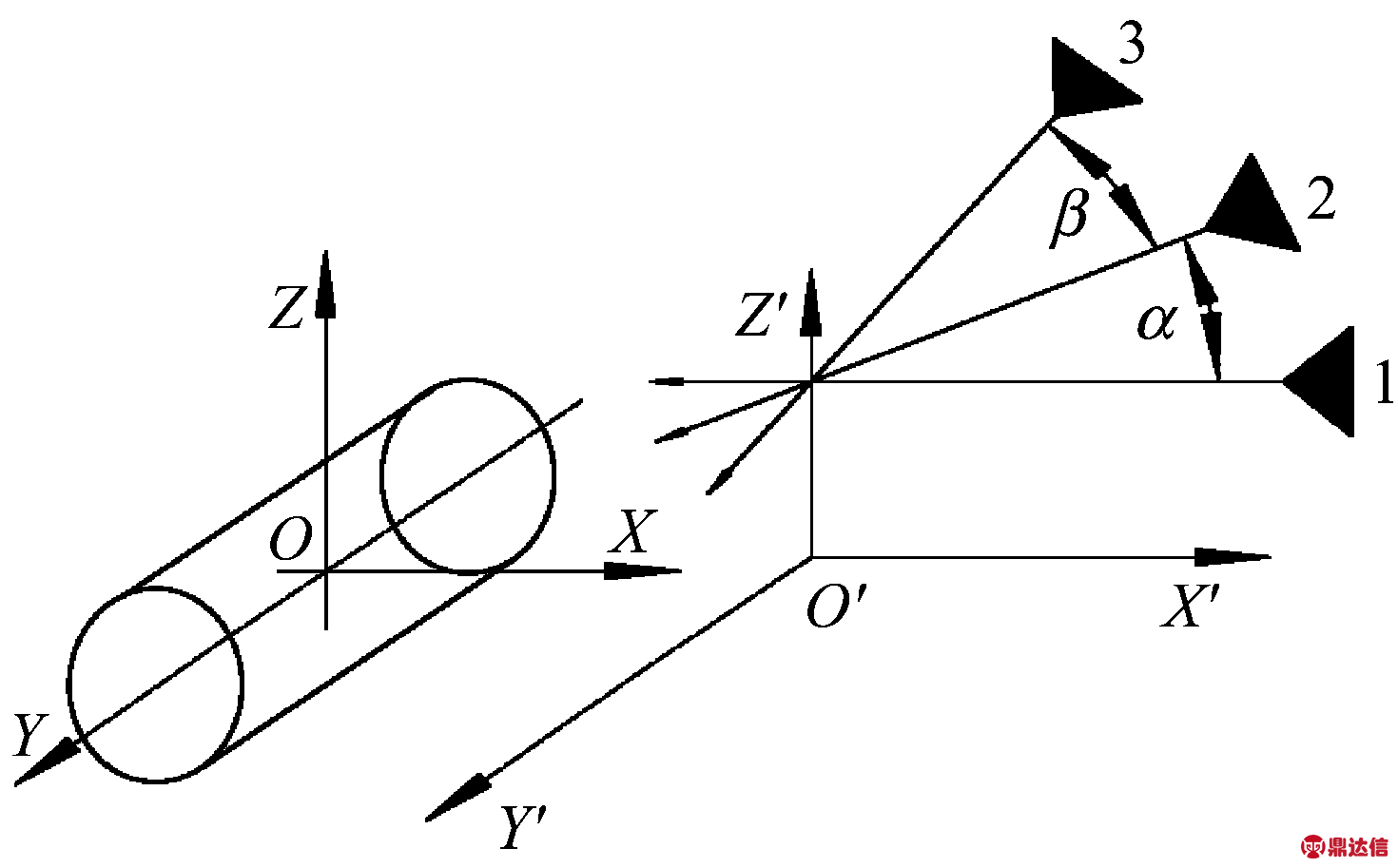
图4 测量原理图
Fig.4 Principle diagram of measurement
情形1为理论安装方式:感测头运动方向沿着z轴方向,传感器测量方向平行于X轴。情形2是在情形1的基础上绕z′轴旋转α,情形3是在情形2的基础上,传感器绕Y′轴存在安装偏差角β,
此时在测量坐标系O′-X′-Y′-Z′中,测出的椭圆轮廓方程为:
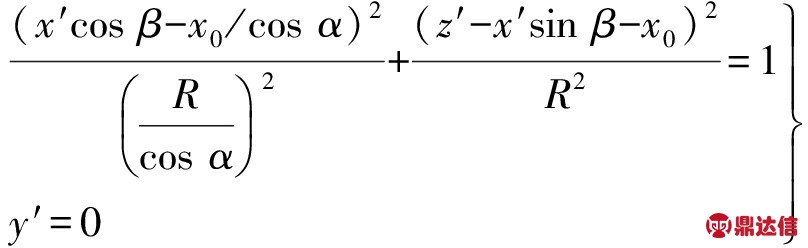
(11)
上述椭圆长轴:
2a=

(12)
短轴:
2b=
(13)
形心坐标:
x′,y′,z′=(x0+![]() ,0,
,0,
![]() )
)
(14)
同时存在如下关系:
2b≤2R≤2a
(15)
如果已知传感器安装的偏差角α,β,联系式(12)~式(14),可以求出椭圆截面的短轴b,形心坐标(x0,y0,z0),其中y0由沿着Y轴方向运动的位移传感器测出;其中截面椭圆的短轴b,实际就为圆柱的半径R。
由测出的长轴可推出
R=
a![]()
(16)
由测出的短轴可推出
R=
b![]()
(17)
考虑实际测量过程中一些误差的影响,式(15)与式(16)所反向算出的R值都有误差,取上述两式计算结果的均值,作为R的最终值。
R=
![]()
![]() +
+
![]()
![]()
(18)
由测出的形心坐标可推出实际截面的形心坐标x0,y0,z0满足:
(19)
将一个已知实测半径为R的标准圆柱,装夹在一确定的位置(x0,y0,z0),此确定位置可以通过额外标定找出,当倾斜测量时,联立测出的值与式(12)、式(13)、式(14),可以标定出传感器的安装偏差位姿角α和β。
对于滑块内滚道,这种数学理论具有重大意义:本测量方案采用的激光位移传感器倾斜安装,所采集到的轮廓就是半椭圆轮廓,通过椭圆的最小二乘法拟合[8], 在原理上可以找出测量斜截面处内滚道的半径R,即拟合椭圆的短半轴;形心位置,即拟合椭圆的形心位置,而传感器的安装位姿可由标定圆柱标定出来。
2.2.2 内滚道位置测量算法
夹具坐标系O-X-Y-Z绕Z轴旋转α并平移动一定距离得到传感器6、7所在测量架的坐标系O1-X1-Y1-Z1,如图5所示。以传感器6为例说明,安装时传感器6的测量方向与X1轴存在安装偏角β;轴线理论方向向量![]() 由2.1部分可以求得
由2.1部分可以求得![]() 在坐标系O1-X1-Y1-Z1中可表示为
在坐标系O1-X1-Y1-Z1中可表示为![]() 两者存在如下关系[9]:
两者存在如下关系[9]:
(20)
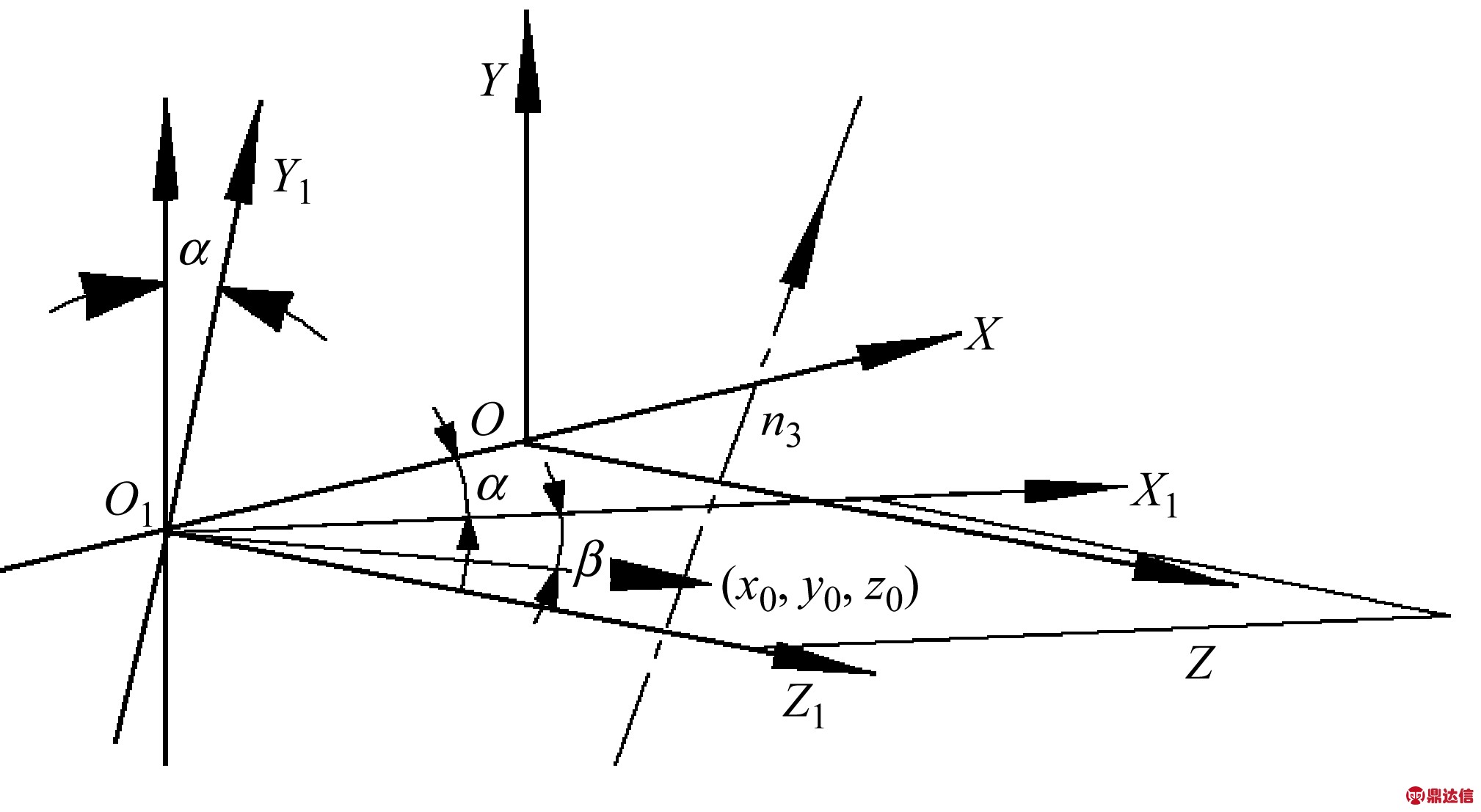
图5 内滚道测量示意图
Fig.5 Schematic diagram of the inner raceway measurement
此时斜截面轮廓的方程可以表示为:
(21)
由于存在安装偏差角β,则传感器测出的轮廓坐标点(xc,yc,zc)与(x1,y1,z1)之间的关系为:
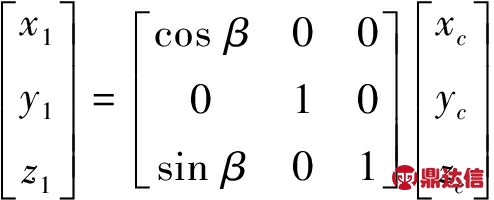
(22)
由上可得测出的椭圆轮廓方程为:
 =R
=R
(23)
按照椭圆的一般方程形式![]() 表示,其中:
表示,其中:
A=![]()
(24)
B=![]()
(25)
C=![]()
(26)
D=![]() -
-
(27)
E=![]() +
+
(28)
假设倾斜测量所得椭圆截面的形心,在坐标系O1-X1-Y1-Z1中的坐标为x0,y0,z0,由文献[8]可知,联立式(22)~式(26),算出测量椭圆的参数与实际内滚道参数之间的关系式:
短轴2b=f1(x0,z0,R)
长轴2a=f2(x0,z0,R)
形心坐标![]()
通过上述四个方程解出x0、z0、R,y0由光栅尺读出。可以求出滑块某一截面内滚道轴线位置坐标x0,y0,z0,由式(18)可得位置坐标在夹具坐标系O-X-Y-Z中表示为:
(29)
相应截面处半径Ri=R。
2.2.3 内滚道平行度测量
由2.2.2部分可测出滑块某一内滚道任意斜截面的形心位置坐标xi,yi,zi,此时测出点与坐标原点所形成的向量为:
此内滚道相对侧基准面B和顶基准面A的平行度t4、 t5可以表示为:
(30)
(31)
由上,同理可以求出其他三条内滚道相对基准面A、B的平行度。
3 安装偏差存在时的影响
滑块在装夹后,可能存在的偏差共有6类,其中三个移动:沿基准坐标系X轴、Y轴、Z轴的偏移,分别以η、δ、ε表示具体偏移量,如图6所示。
当出现上面三种情况的偏差时,所采集的数据信号图仅仅相当于沿着某一轴平动,在原理上不影响最终结果。
出现偏转时,沿X轴、Y轴、Z轴分别旋转φ、φ、ω,如图7所示。
上述三种形式,偏转的位置姿态均可由方向向量n3表示出来,在滑块安装稳定的情况下,不会影响实际测量结果。
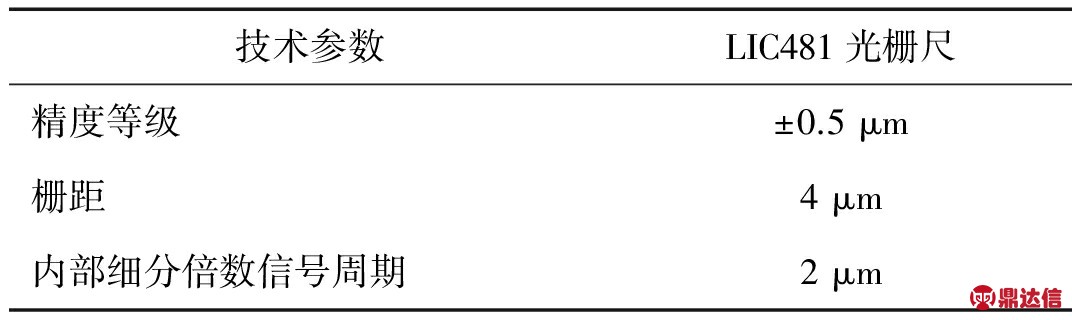
图6 移动偏差示意图
Fig.6 Schematic diagram of moving deviation
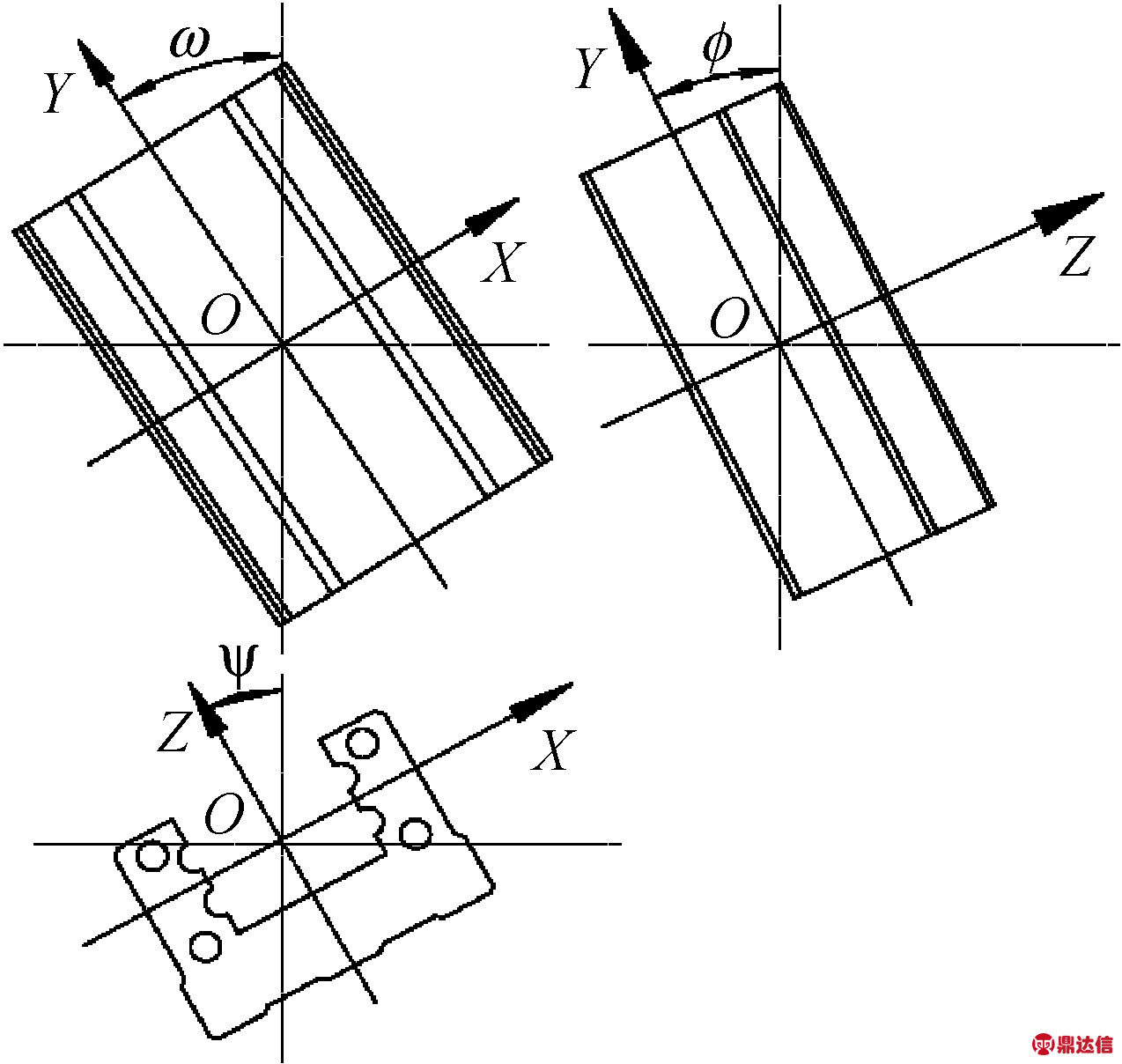
图7 转动偏差示意图
Fig.7 Schematic diagram of rotation deviation
4 倾斜测量方案试验验证
工程中采用激光位移传感器倾斜安装,测量的工件轮廓的方法暂无先例,本测量算法的精度要求为5 μm,有必要通过试验对其测量结果的稳定性和准确性进行评价。
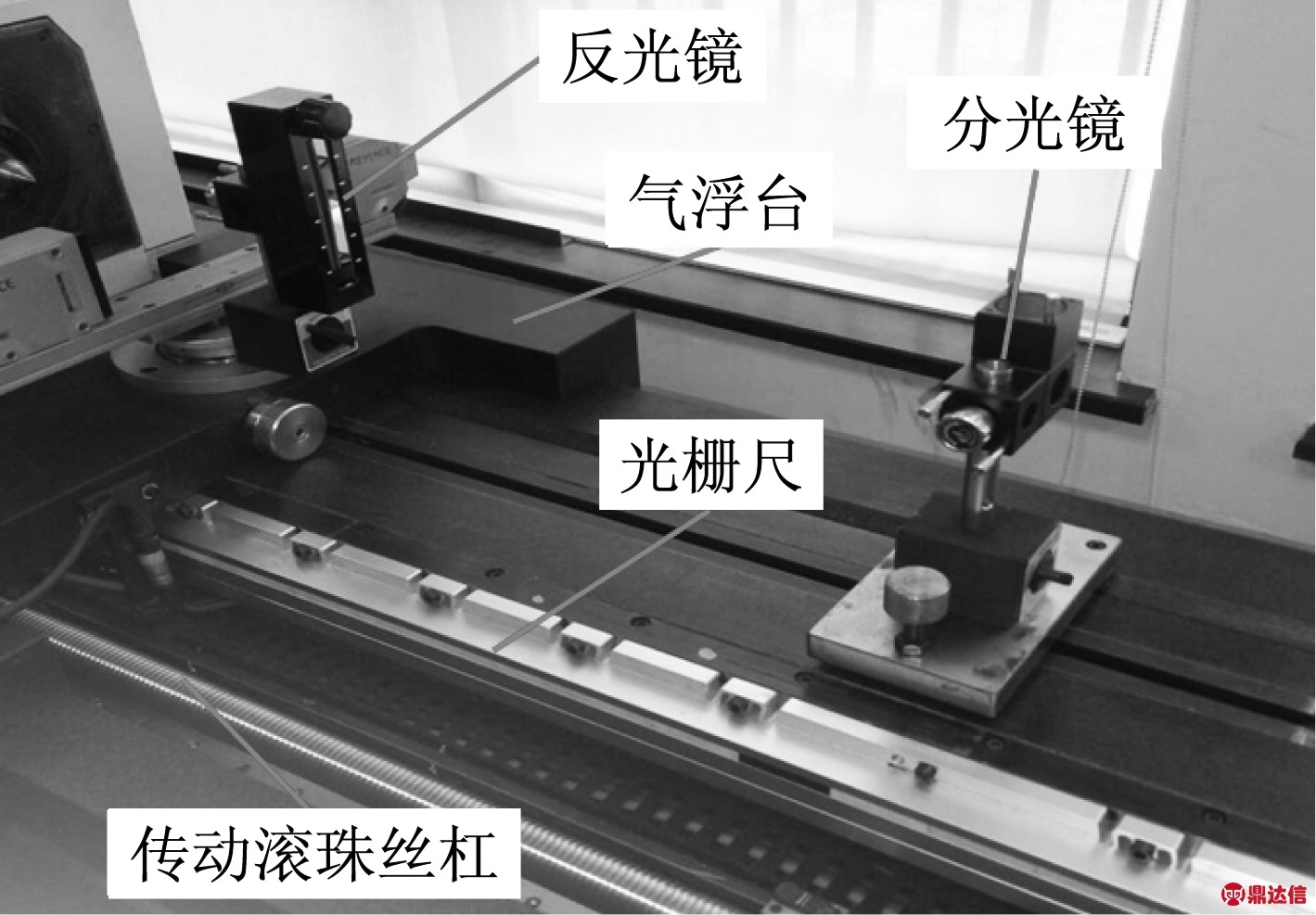
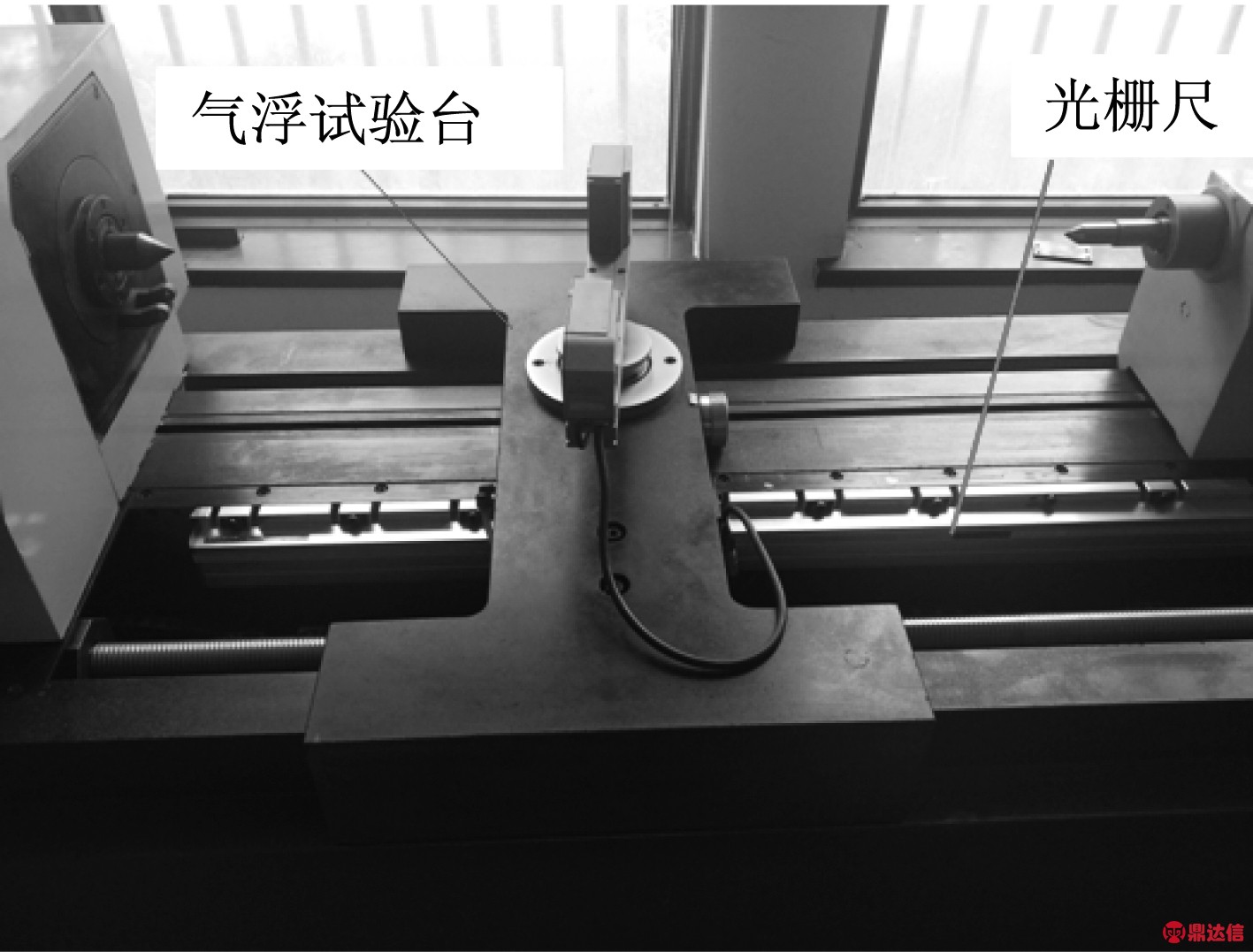
方案验证试验是基于南京理工大学自主研发的齿形测量仪试验台,如图8所示。借助大理石气浮平台的高稳定性,以及HEIDENHAN光栅尺高精度,将气浮平台上的传感器换为Keyence的激光位移传感器感测头LK-H050。
图8 滚珠丝杆外滚道齿形测量仪
Fig.8 Measuring instrument for outer roller path tooth shape of ball screw
4.1 试验台的运动精度
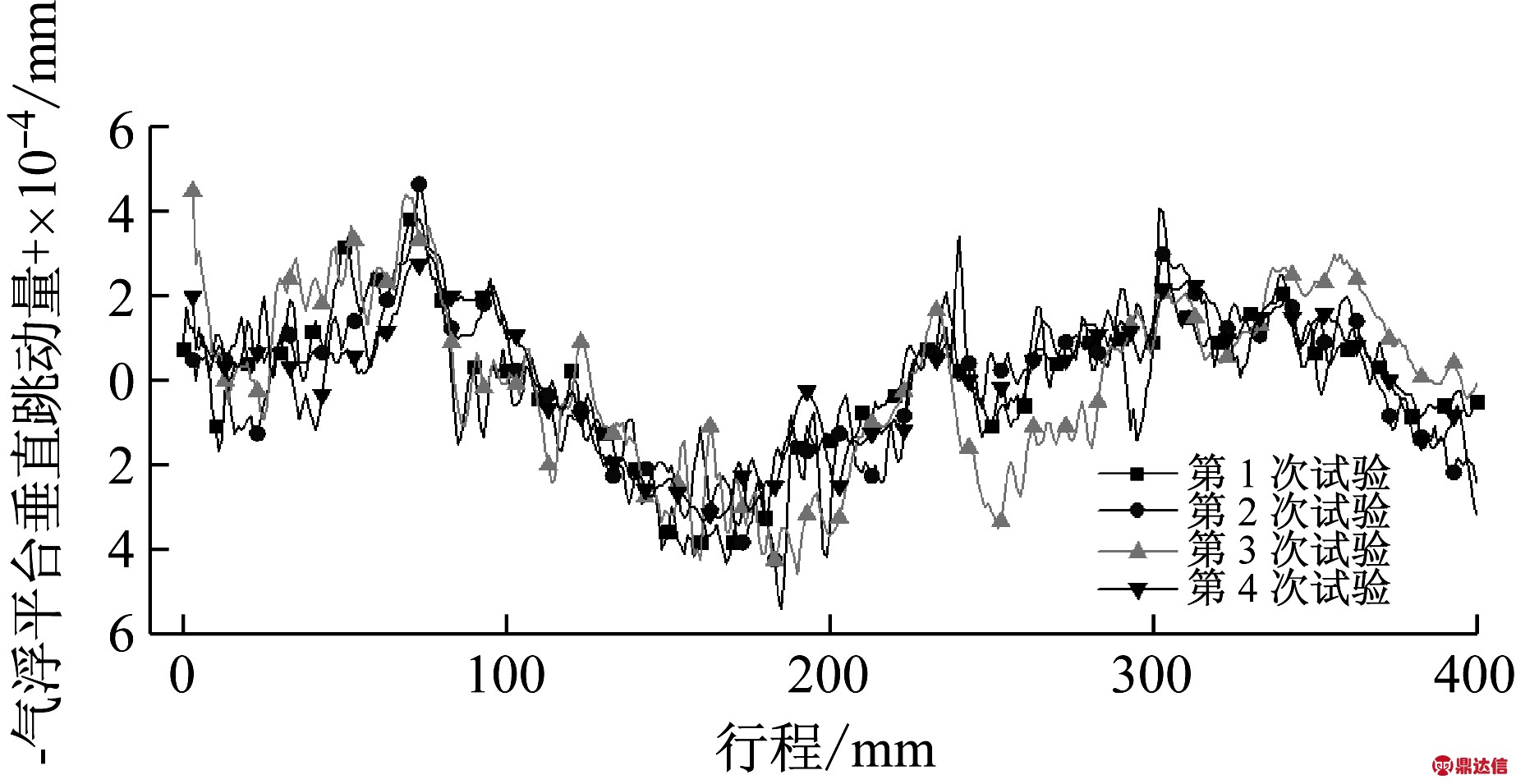
图9为用雷尼绍激光干涉仪测量气浮运动平台的行走跳动量;图10为气浮平台行走垂直跳动测量图,图11为气浮平台行走水平跳动测量图。
图9 试验台行走跳动量测量示意图
Fig.9 Schematic diagram of measurement of walking jitter of test bed
图10 气浮平台垂直跳动量测量结果
Fig.10 Results of vertical jitter measurement of air bearing test bed
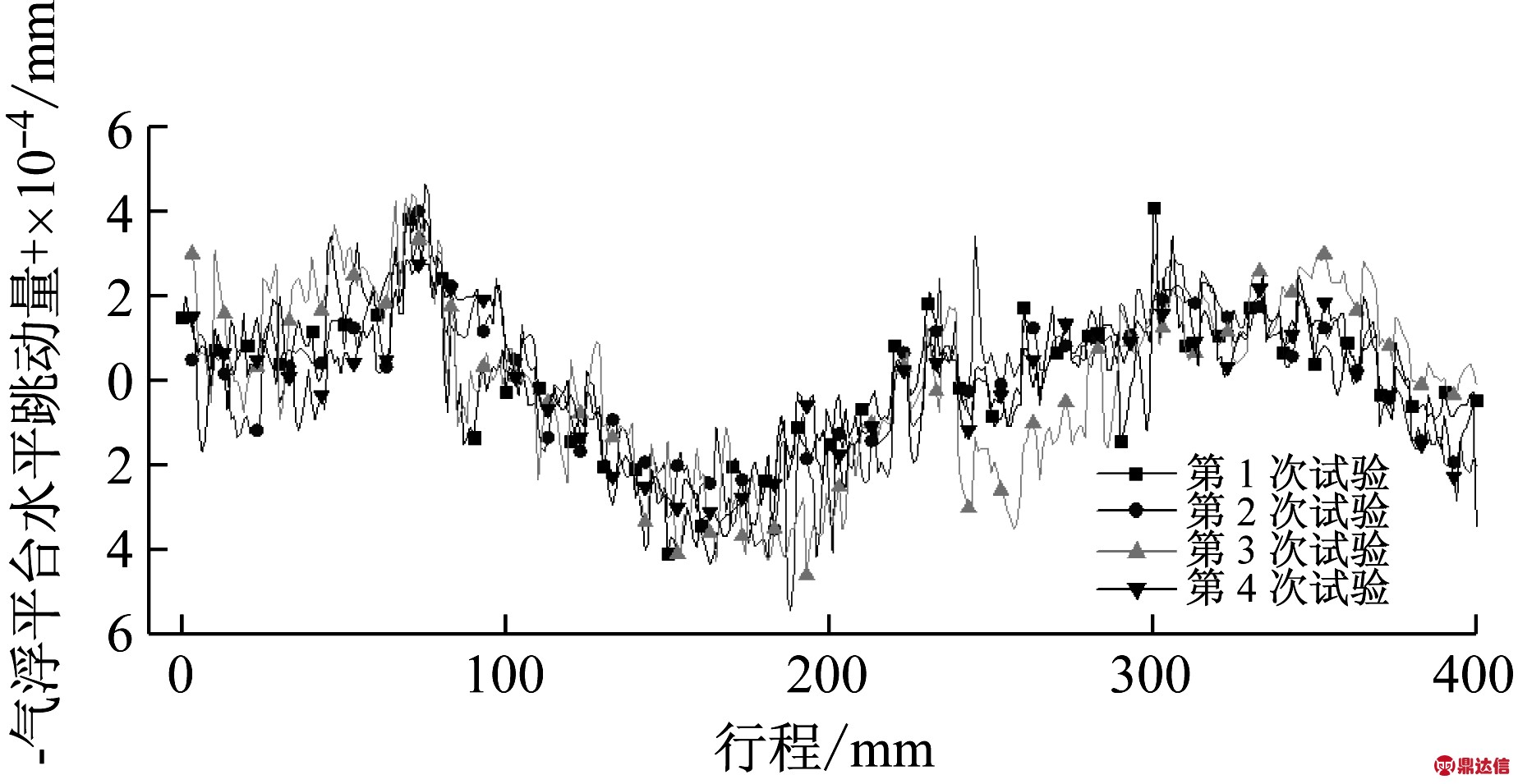
图11 气浮平台水平跳动量测量结果
Fig.11 Results of horizontal jitter measurement of air bearing test bed
测量得气浮运动平台水平跳动量为±0.52 μm,垂直跳动量为±0.55 μm,气浮平台的行走跳动量量纲一般为10个纳米,而实际测出的行走跳动量量纲为100个纳米,这是由于本试验台是通过滚珠丝杠传动的,而不是采用直线电机悬浮驱动,使得测出的气浮运动平台行走跳动量较大,但相对算法的精度要求5 μm,气浮运动平台的行走跳动性能较好。
4.2 传感器性能
表1为本算法涉及到的HEIDENHAN光栅尺参数。
表1 HEIDENHAN光栅尺参数
Tab.1 Parameters of HEIDENHAN grating ruler
光栅尺的精度等级±0.5 μm解释为:任意1 m距离内,测量误差为±0.5 μm。
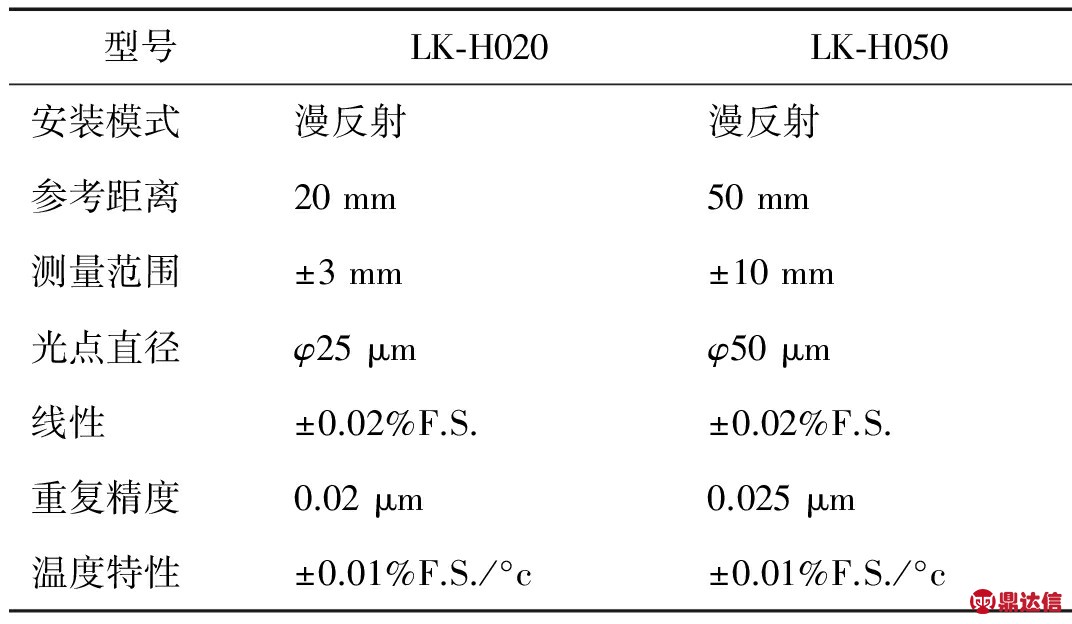
表2为本算法涉及到的激光位移传感器的参数,传感器的重复精度为0.025 μm,而算法的精度要求5 μm,相对于算法精度要求,传感器的重复精度极好。
表2 Keyence传感器参数
Tab.2 Parameters of Keyence sensor
同时Keyence激光位移传感器LK-G5000系列型号LK-H050的测量头,线性度误差为±4 μm,因此传感器本身会带来一定误差,线性度误差的产生是由于电子元件存在零点漂移,零点漂移是一个随机事件;上述问题可以建立一个数学模型:当待测物体与传感器基准点之间的实际位置为a时,传感器实际读出的值x是位于区间a-0.004,a+0.004内,均匀分布的随机事件,记为x~Ua-0.004,a+0.004;期望Ex=![]() =a。
=a。
在同一安装条件下,对同一待测元件重复测量多次,对测量值求取平均值,可以逐步较低线性度误差的影响:
即
式中,n为重复测量次数,xi表示第i此测出的值。
上述理论的前提:传感器的重复性与测量架运动精度重复性较好。
4.3 测量系统精度仿真分析
通过MATLAB编写相关程序,将气浮平台行走跳动值、光栅尺误差以及传感器线性度误差产生的跳动值以随机误差的方式添加到其误差敏感方向。图12为测量系统精度分析流程图。
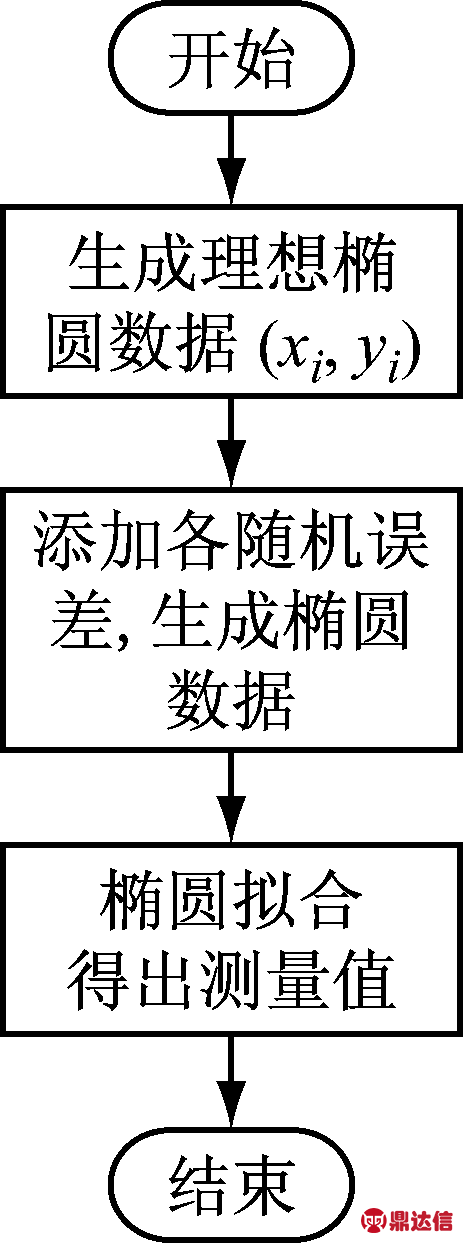
图12 测量系统精度分析流程图
Fig.12 Accuracy analysis flow chart of measurement system
首先生成已知形心位置为5,6,已知直径为φ9.996的理想圆柱,然后在形心位置为5,6处,分别以15°、20°、25°、30°、35°、40°的倾角剖切圆柱并生成理想半椭圆数据xi,yi,然后添加误差值:图13为测量系统精度分析示意图,x轴方向为气浮台运动方向也为光栅尺精度影响测量精度的误差敏感方向,因此对xi加上一个在-0.5 μm到0.5 μm范围内均匀分布的一个随机误差ε;y轴方向为激光位移传感器测量方向,也为气浮平台的水平跳动与激光位移传感器的影响测量精度的误差敏感方向,因此对yi加上一个在-0.52 μm到0.52 μm范围内均匀分布的一个随机误差ξ与一个在-4 μm到4 μm范围内均匀分布的一个随机误差ζ,最终生成椭圆数据xi+ε,yi+ξ+ζ;最后对xi+ε,yi+ξ+ζ进行椭圆拟合,算出其椭圆长轴2a、短轴2b、形心横坐标xc、形心纵坐标yc,每个倾角状态重复测量32次,对同一倾角状态下的测量值求取平均值;各倾角状态下测量出的椭圆长轴2a、短轴2b、形心横坐标xc、形心纵坐标yc,32组值中的最大值、最小值、平均值、标准差以及理论值与仿真结果平均值的差值Δ如表3至表8所示。
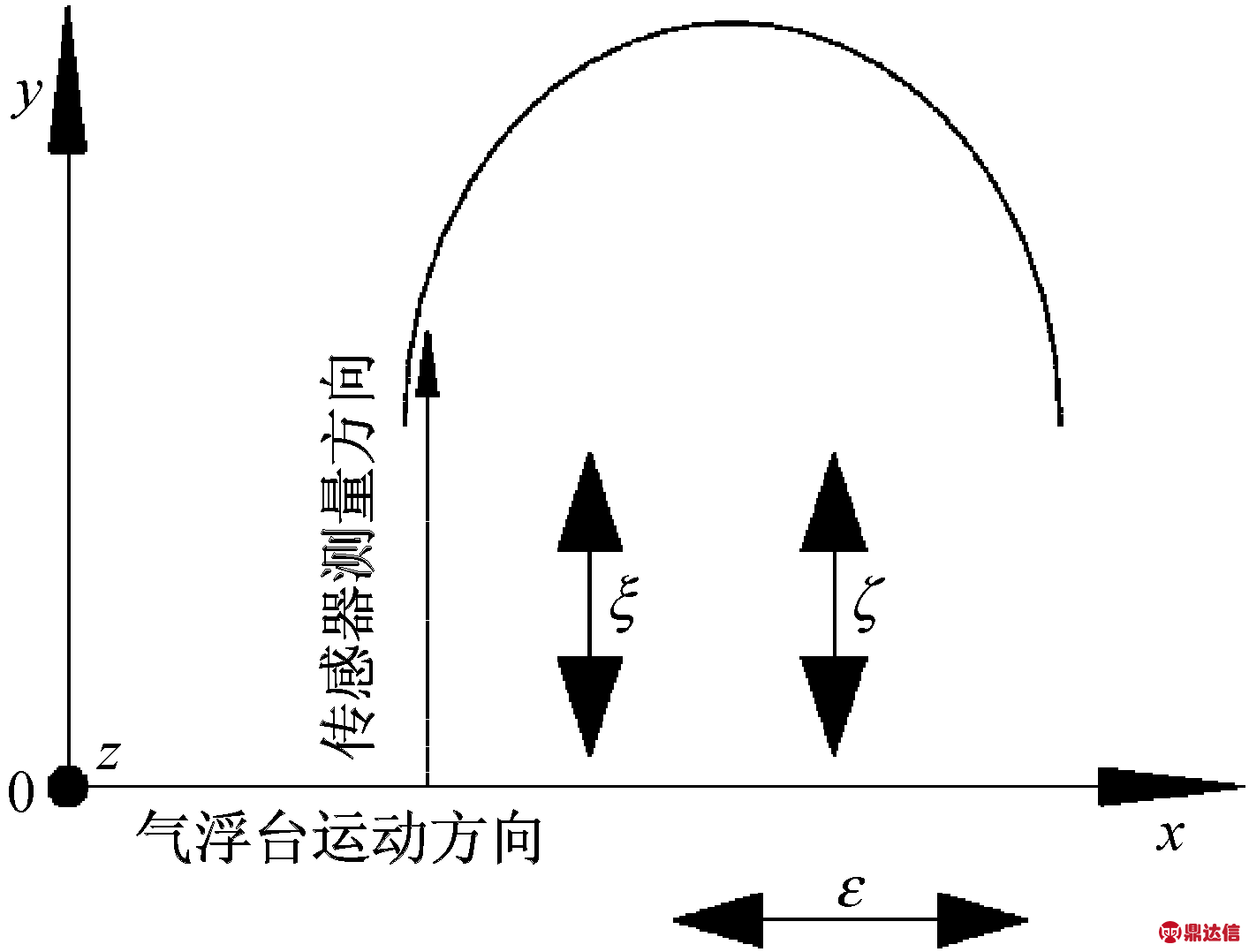
图13 测量系统精度分析示意图
Fig.13 Schematic diagram of measurement system accuracy analysis
表3 15°倾角仿真结果
Tab.3 The simulation result at the angle of 15°

表4 20°倾角仿真结果
Tab.4 The simulation result at the angle of 20°

表5 25°倾角仿真结果
Tab.5 The simulation result at the angle of 25°

表6 30°倾角仿真结果
Tab.6 The simulation result at the angle of 30°

表7 35°倾角仿真结果
Tab.7 The simulation result at the angle of 35°

分析表3至表8可以得:测量出的椭圆短轴与名义短轴的差值以及测出值变化范围都在1 μm内;测出的椭圆长轴与名义长轴的差值在1 μm内,而测出值得变化范围在丝级以内;测量出的椭圆形心横坐标与名义形心横坐标的差值以及测出值变化范围都在1 μm内;测量出的椭圆形心纵坐标与名义形心纵坐标的差值以及测出值变化范围都在较大,但是测出值得变化范围在5 μm以内,在算法要求的测量精度5 μm范围内,因此可以将测出的椭圆形心纵坐标与名义形心纵坐标的差值作为一个固定的补偿值用于实际测量中。
表8 40°倾角仿真结果
Tab.8 The simulation result at the angle of 40°

通过上述理论与仿真分析可以得出,原理上本算法满足测量的精度要求。
4.4 测量算法试验验证
如图14所示。将经过研磨的高精度圆柱安装在旋转台上,将激光位移传感器安装在气浮平台上,当气浮平台运动时,光栅尺与激光位移传感器同时采集数据,通过相应MATLAB程序处理算出待测圆柱被测截面处椭圆轮廓的短轴与形心位置。实验对象本应该为标准半圆槽,但在工程上标准圆槽加工难度远超过外圆,因此直接采用外圆柱,以高精度圆柱为实验对象,其名义尺寸为∅10,实测尺寸为∅9.996,圆度为0.003,直线度为0.003;实验过程中,通过旋转台设置名义安装偏角α为15°、20°、25°、30°、35°、40°、β都为0°;在同一名义安装偏角下,对高精度圆柱进行32次重复实验,测量所得的椭圆长轴2a、短轴2b、形心横坐标xc、形心纵坐标yc,测量过程如图15所示。
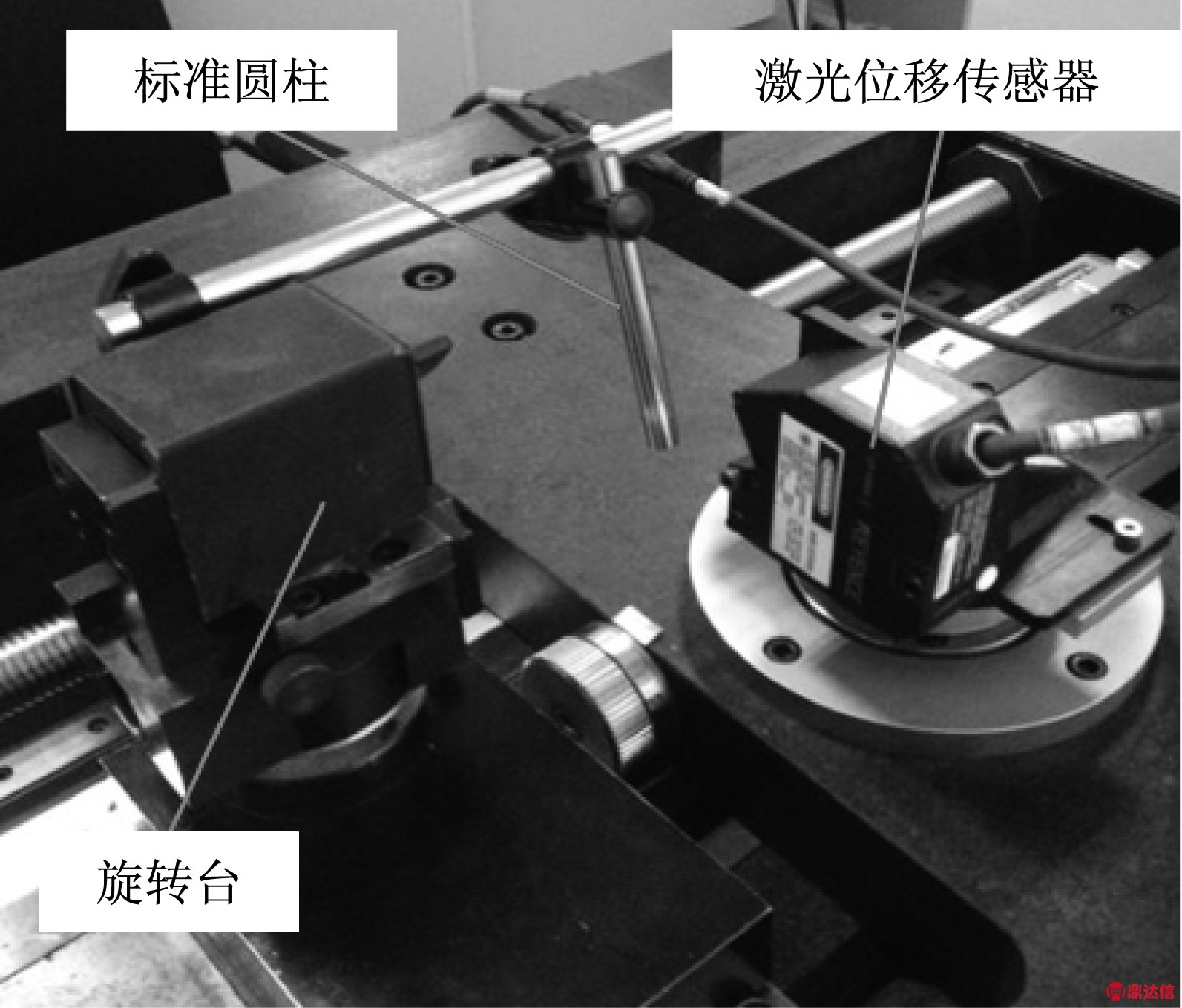
图14 试验安装图
Fig.14 Installation diagram of test
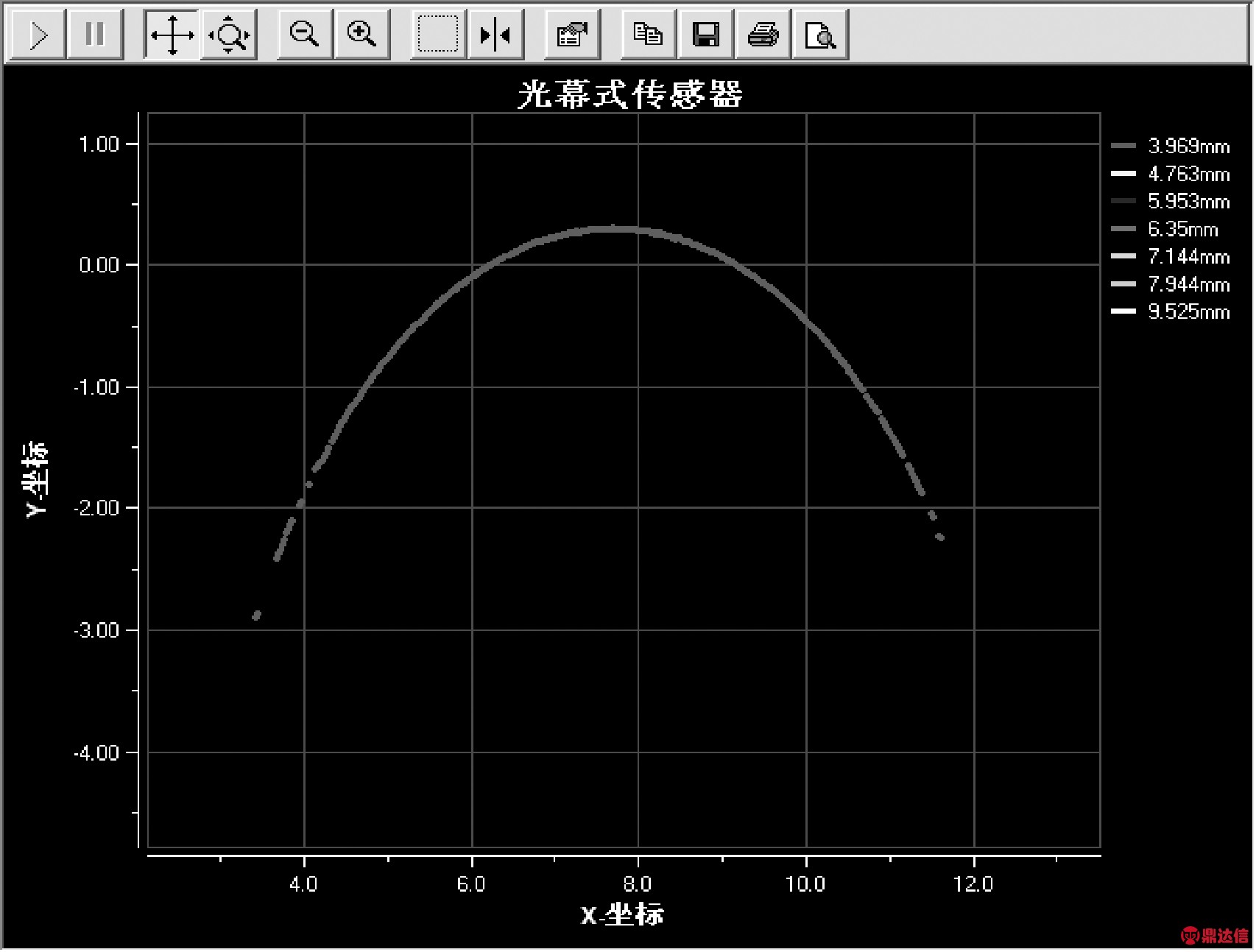
图15 测量过程图
Fig.15 Diagram of measurement process
图15为试验过程中所采集的圆柱某一倾斜状态下的截面轮廓。
对同一名义安装偏角下的32组值求取平均值与标准差,以及理论椭圆长短轴与测量结果的差值Δ,如表9至表14所示。
表9 15°倾角时测量结果
Tab.9 The measurement results at the angle of 15°

表10 20°倾角时测量结果
Tab.10 The measurement results at the angle of 20°

表11 25°倾角时测量结果
Tab.11 The measurement results at the angle of 25°

表12 30°倾角时测量结果
Tab.12 The measurement results at the angle of 30°

表13 35°倾角时测量结果
Tab.13 The measurement results at the angle of 35°
表14 40°倾角时测量结果
Tab.14 The measurement results at the angle of 40°

上述测出的椭圆长轴2a、短轴2b以及圆柱的实际尺寸∅9.996,联系式(16)、式(17)可以解出实际安装偏差角α,β。在本试验中,不同倾角下,实际倾角与理论倾角如表15所示。
分析表9至表14可以得:测量出的椭圆短轴2b与理论短轴的差值在4 μm内;变化范围在4 μm以内,可以得出本算法测量滑块内滚道半径的精度满足5 μm的测量精度要求。在同一条件下,继续增大重复测量的次数,可以得到更高精度的结果。测量出的椭圆形心横坐标xc变化范围在2 μm以内,满足测量精度要求,测量出的椭圆形心纵坐标yc变化范围较大,随着偏角的增加,测量值的变化范围反而变小,由表12至表15的测量结果可以看出,当偏角α≥30°、β≤0.65°时,滑块内滚道纵坐标值的测量也满足测量精度要求。
表15 实际偏角与名义偏角的对比
Tab.15 Comparison of actual inclined angles and nominal inclined angles
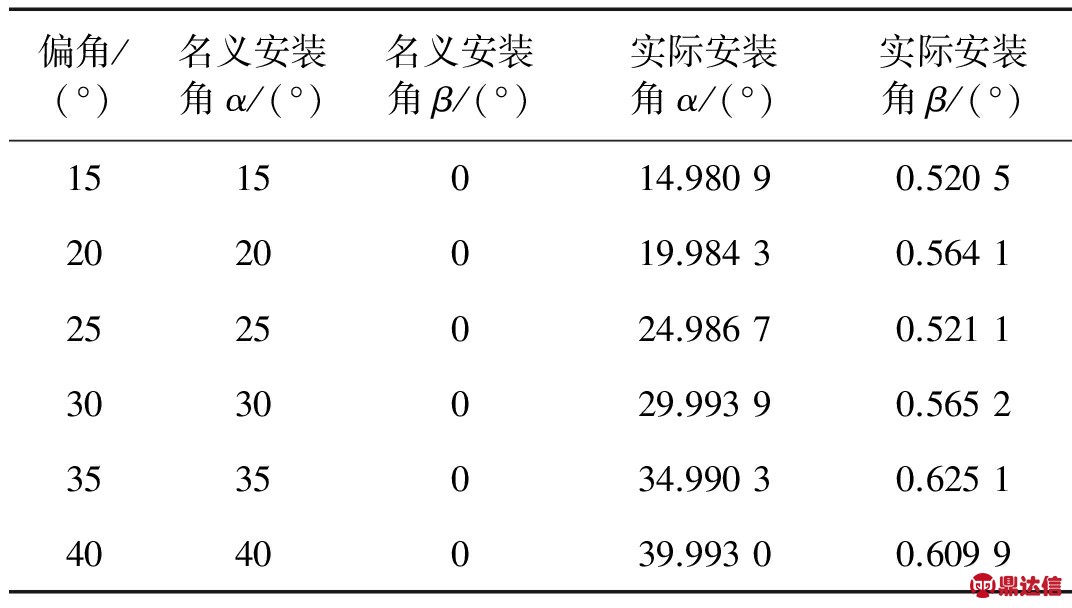
由于安装偏差的存在,由式(15),实际的结果应该满足:
2b≤d名义≤2a
由表9~表14可以看出,理论与实际数据契合;具体的偏差角度可以通过已知实测尺寸的标准圆柱标定出来如表15所示:圆柱正确安装在夹具上时,可以通过实测出的长短轴值、测出的形心坐标值联立式(12)、式(13)以及式(14)可以反向标定出传感器相对夹具坐标系的位姿偏角α,β。实际工件相对夹具坐标系的位姿可以由理论内滚道轴线向量n3表示,n3可由式(6)求得。
本试验用标准外圆轮廓等效代替内圆轮廓的方法,很好的验证倾斜测量内滚道了数据的稳定性,以及准确性;同时给出了理论标定算法。验证了算法方案的可行性。
4.4 误差分析
上述试验重点在于,检验三角激光反射测量原理传感器倾斜安装时,椭圆截面的数据提取的稳定性与准确性。
4.4.1 传感器误差
对于三角反射测量原理的激光位移传感器,测量时易受粉尘与工件表面清洁影响[10]。
4.4.2 算法误差
最小二乘椭圆拟合算法,由于包含了误差较大样本点在内的所有样本点都参与运算,会对椭圆拟合的最后结果产生偏差[11]。
5 结 论
本文通过倾斜测量滑块内滚道轮廓的方式,给出了滑块内滚道相对基准的平行度、滑块基准面的平面度、夹角以及滚道半径的算法,并用高精度圆柱,做内滚道椭圆拟合的等效方案实验,实验结果与预期理论相契合,同时稳定性在允许的范围内。验证了倾斜安装测量内滚道方案的可行性,为滚动直线导轨副滑块内滚道的测量提供了算法与方案依据。


