
摘 要 国内具有完全自主知识产权的第1列导轨电车已研制成功。详细介绍了导轨电车车辆的总体技术特征及编组设计方式,并对铰接方式的可行性进行论证阐述了走行部的结构组成及导向机构工作原理,简要说明了导轨电车牵引系统、制动系统及空调采暖系统的特点。通过车辆通过小半径曲线及S型曲线的仿真计算,未发现车辆有干涉情况。
关键词 导轨电车;低地板;车辆技术;系统设计
导轨电车是一种由胶轮承载及驱动的自导向型中低运量轨道交通系统,可实现3~6节灵活编组,具有方便乘坐、转弯半径小、爬坡能力强、制动距离短、线幅占地面积小、基础设施简单、建设周期短等优点,适用于中小城市内部、城市与市郊(或卫星城)之间、城市新区或开发区内部及旅游景区等区域,能有效缓解城市交通拥堵。
1 概况
2016年,中车四方车辆有限公司成功研制了国内第1列具有完全自主知识产权的现代导轨电车。该电车采用双司机室设计,可双向驾驶,采用橡胶轮胎承载,由单轨钢轮导向及回流,DC 750 V接触网供电模式。电车为100%低地板,其地板面高度为270 mm,其客室实现了无障碍通过。电车最高运行速度为80 km/h,最大爬坡坡度为13%,最小转弯半径仅为15 m。
电车采用“Mc+Tp+Mc”的编组形式。其中,Mc为带司机室的动车,Tp为带受电弓的拖车。
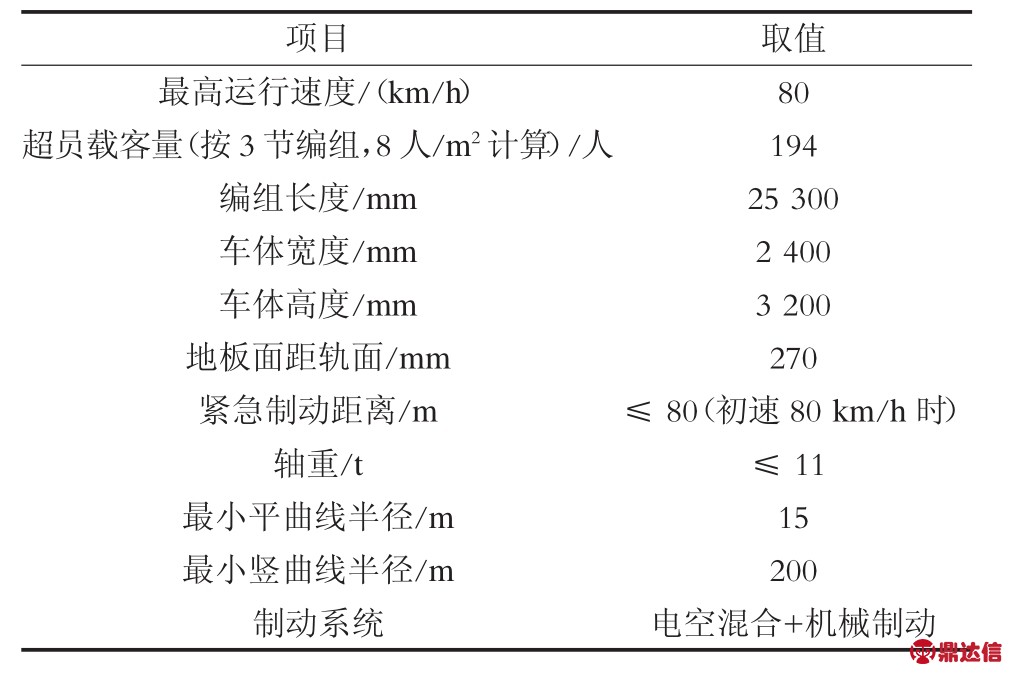
导轨电车车辆编组图见图1。导轨电车的运用条件见表1,车辆的主要技术参数见表2。
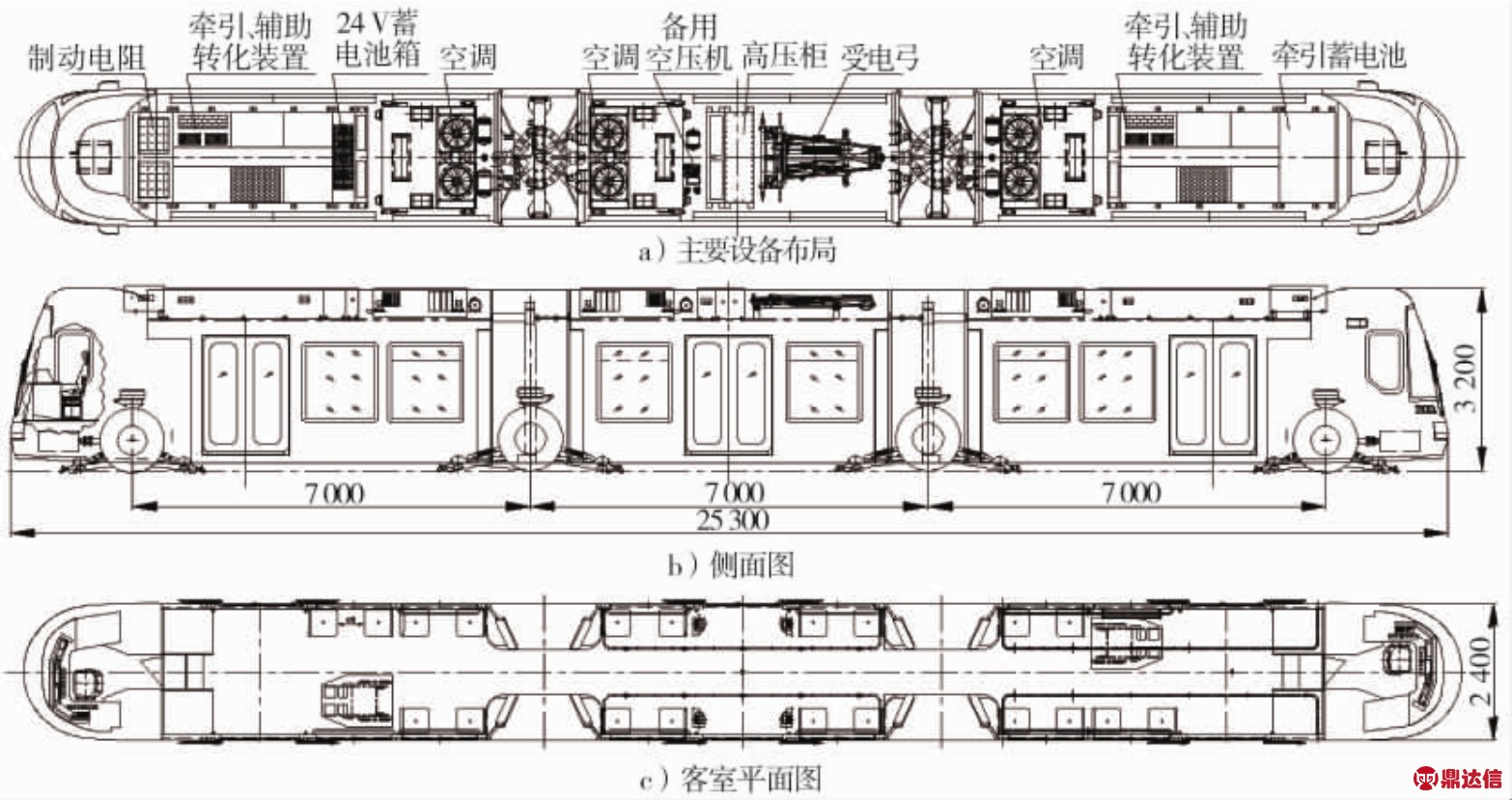
图1 导轨电车车辆编组图
表1 导轨电车的运用条件
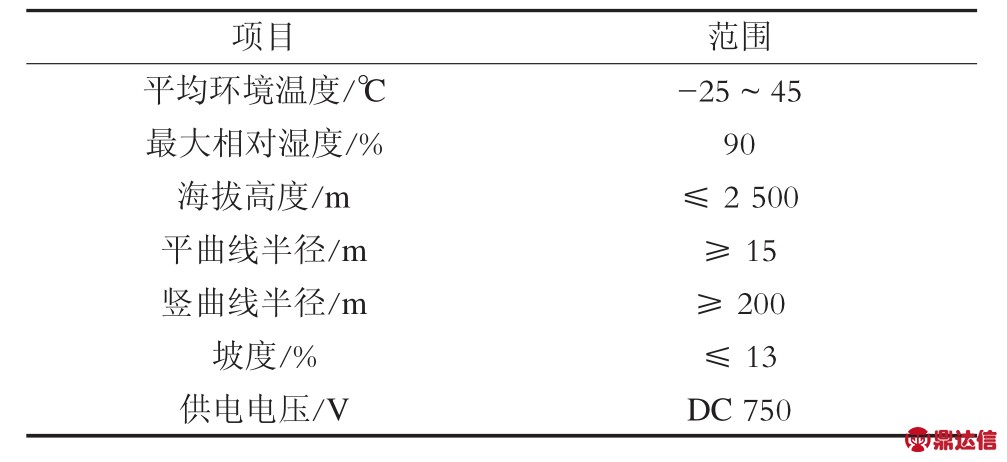
表2 导轨电车车辆的主要技术参数
2 车辆系统设计
导轨电车的车辆系统设计主要涵盖车辆编组方式、车辆动力学分析、车辆曲线通过能力分析、车体与构架强度疲劳分析、车辆牵引制动性能匹配等方面。
2.1 车辆编组方式
导轨电车的3节车体通过2组铰接装置连接。导轨电车利用钢轮与钢轨之间的横向作用力来实现自导向,其垂向和纵向力的传递通过胶轮实现。导轨电车的车辆编组模型如图2所示。
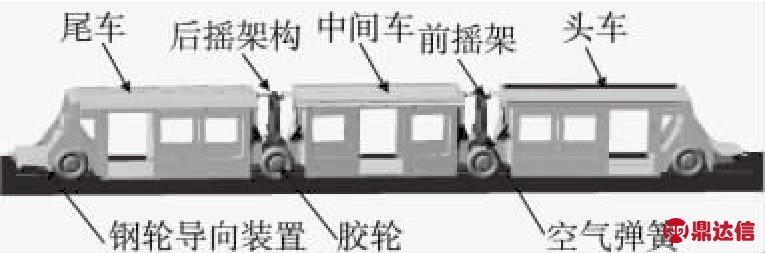
图2 车辆编组模型
导轨电车主要在公路上行驶,所处路况较复杂。当导轨电车经过不平整时路面时,3节车体会先后出现侧滚,车体之间会形成较大的扭转角度。这就要求车体铰接点处沿纵向轴具有一定旋转自由度。导轨电车经过坡道时,会出现第一节车体已经上了坡道,另外2节车体还处于水平路面上的情况,这时在2节车体之间形成了1个夹角。这就要求铰接点处在横向也具有一定旋转自由度。因此,在车体与摇架之间选用轴向盘式+球形的复合铰接式轴承(见图3),在端部车体与摇架之间安装抗侧滚装置,在中间车体与摇架之间安装三角拉杆式弹性铰及抗侧滚装置(见图4)。

图3 复合铰接轴承
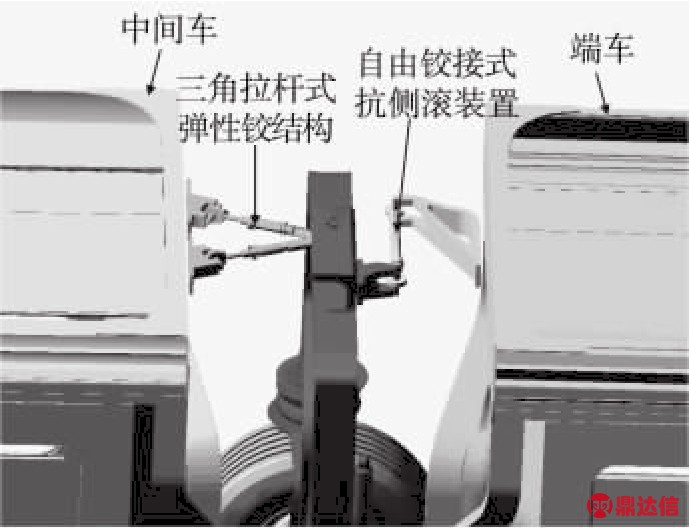
图4 三角拉杆式弹性铰及抗侧滚装置
2.2 车辆曲线通过能力
为论证车辆水平小半径曲线通过性能,设计了模拟计算的曲线轨道。其中小半径曲线轨道是半径为15 m的1/4圆曲线,S曲线轨道的半径也均为15 m。
当头车、中间车、尾车进入弯道时,通过模拟仿真模型对车下及车端位置干涉情况进行检查。未发现车辆有干涉点情况。
2.3 车体结构
导轨电车车体由司机室车体、客室车厢和贯通道组成。客室车体采用轻质铝合金焊接结构。
车体结构强度设计按照EN 12663—1中P-V类轨道交通车辆的车体结构要求。车体结构强度计算的载荷工况及相应计算结果见表3。
2.4 走行结构
导轨电车走行部由动力走行部及非动力走行部组成,采用由胶轮承载及驱动,由单轨钢轮导向的结构。
动力走行部主要由驱动轮桥、导向机构、悬挂及牵引装置等组成(见图5)非动力走行部主要由承载桥组成、导向机构、悬挂及牵引装置等组成(见图6)。
表3 车体结构强度计算的载荷工况及相应计算结果
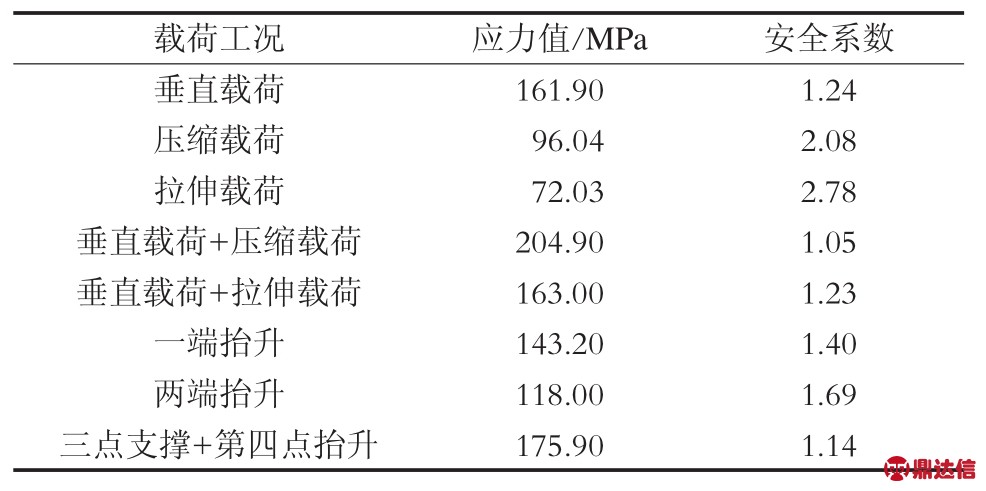

图5 动力走行部
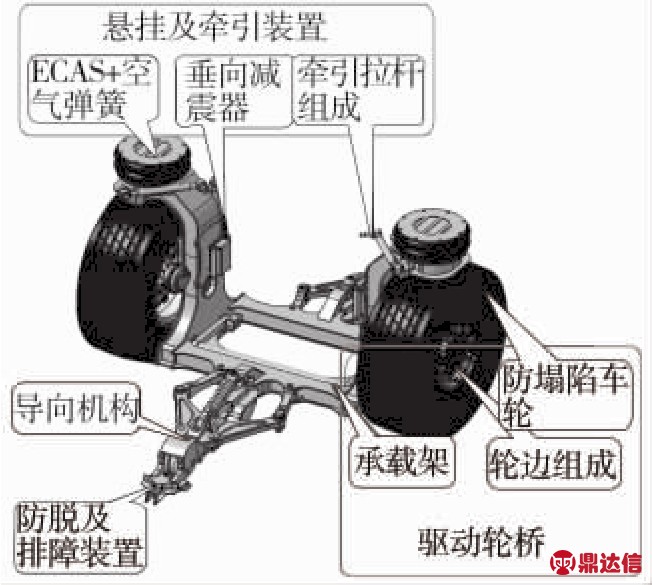
图6 非动力走行部
当导轨电车左转行驶时,导向轮滑块与导向连杆接触,使前端导向连杆处于锁闭状态,而后端导向轮的滑块和导向连杆均处于开合状态,从而实现左转行驶的导向功能。
当导轨电车反方向行驶时,切换导向机构锁闭状态,即可实现反方向导向功能。导向机构组成见图7。
根据走行部动力学计算的模拟结果,在15 m半径曲线轨道上,导轨电车所有轮胎的侧偏角均未超过4°;在其他半径曲线轨道上,轮胎的侧偏角也均在正常水平。导向轮在重车通过15 m半径曲线时导向力为12 kN,轮胎最大竖向力为62 kN。
2.5 牵引系统与制动系统
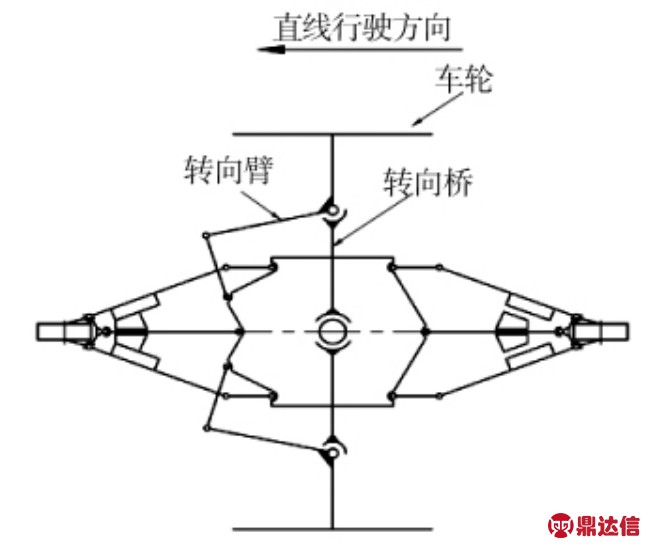
图7 导向机构组成
导轨电车牵引系统主要由受电弓、高压断路器、高压箱、牵引逆变器、牵引电机、牵引蓄电池和电阻制动装置等组成。
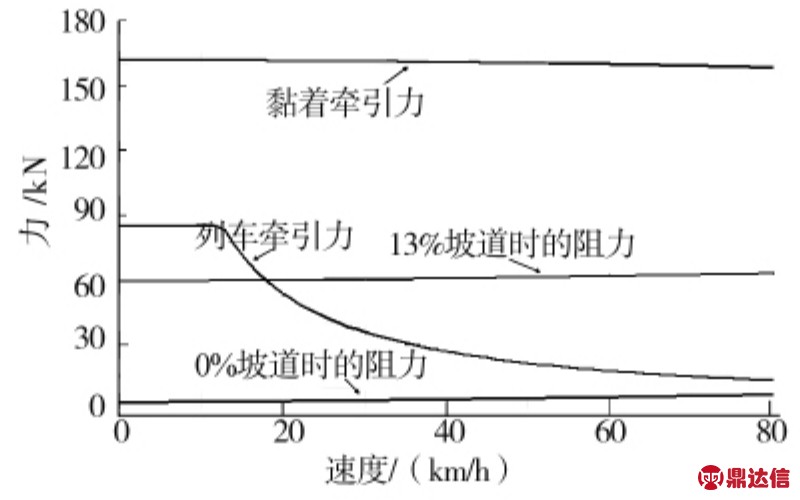
图8 牵引特性曲线
牵引电机额定功率为166 kW,最大牵引扭矩为2 200 N·m。牵引特性曲线如图8所示。
导轨电车采用微机控制式直通式电空制动系统。该制动系统内设监控终端,具有自诊断功能,采取电制动优先设计,有常用制动、快速制动、紧急制动、保持制动、停放制动及极限制动等6种制动模式,具备EBS(电控制动系统)制动力调整及防滑控制功能。
基础制动采用盘型制动。当制动初速度为80 km/h时,制动距离为68.3 m。
2.6 其他
空调采暖系统采用顶置单元式空调机组,满足GB/T 23431—2009《城市轻轨交通铰接车辆通用技术条件》的要求。
采用航空级轻型材料作为内部装饰的结构设计材料。其轻量化效果明显较普通玻璃钢相比可减重约1/3。
3 试验与验证
根据GB/T 14894,导轨电车开展了曲线通过、车体及设备密封性、车体及构架强度、牵引性能、制动性能等20余项型式试验。试验结果均符合设计要求。
目前导轨电车仍处于运行考核阶段,已在试验线累计完成了3 000 km运行考核目标。按下来将进行载客试运行。


