
摘 要:直线导轨的扭曲误差是影响滚动直线导轨副精度的一个重要因素,导轨校扭是提升产品质量的重要手段。理论计算是设备生产的指导,通过对导轨校扭的理论计算可以寻找合适的导轨校扭方法,提高导轨校扭的准确性和生产效率。本文即针对导轨校扭理论及计算方法进行介绍。
1. 导轨校扭的背景
导轨毛坯或热处理后的导轨材料都会存在一定的变形,这种变形包括扭曲变形和弯曲变形。导轨生产厂家为了提高产品的质量,在生产过程中需要对导轨进行校扭和校直处理。导轨校扭工序放在校直之前,经过校扭的导轨更容易达到较高的校直精度,并且可以减小直线度误差和加工余量,进而提高直线导轨的生产效率和加工精度。
目前,我司采用的校扭设备相对简陋,操作工人需要反复多次试校,效率低、劳动强度高,精度不易保证,远不能满足企业生产发展的需要。因此,迫切需要改进工艺方法,提升装备水平,通过技术创新来提升产品的质量。
2. 导轨校扭理论
导轨是矩形截面的杆件,材料是GCr15。对于理想弹塑性材料制成的杆件,当转矩从0不断增大,直至截面上某处开始屈服为止,这时的状态为弹性极限状态,对应的转矩为弹性极限转矩Te。当转矩继续增大时,截面上同时出现塑性区和弹性区,转矩越大,塑性区越大,弹性区越小,直至截面全部成为塑性区,这时为塑性极限状态,对应的转矩为塑性极限转矩Ts。
(1)矩形杆件转矩计算公式。在弹性阶段,对于矩形杆件两端相对扭角为θ的转矩T,其计算公式为
式中,G为材料的切变模量;L为杆件的长度;a和b是杆件截面的长和宽;β是与a/b有关的系数。
矩形杆件弹性极限转矩Te计算公式为
式中,Misses屈服条件![]() ; Tresc屈服条件
; Tresc屈服条件![]() ,σs为材料的屈服极限。
,σs为材料的屈服极限。
在弹塑性阶段,对于矩形杆件两端相对扭角为θ的转矩T,其计算公式为
式中,a为修正系数(a= -210.1076θ3+134.8489θ3-25.4609θ2-25.4609θ+2.2885)。
矩形杆件塑性极限转矩Ts计算公式为
(2)导轨转矩计算。导轨是以截面的大小来定型,常用的型号是15~65。在相同条件下,材料截面越大,其可承受的转矩越大。现按65导轨进行转矩计算,根据我司的导轨属性,相关数据如下:a=55mm,b=65mm,L=2 500mm,σs=347MPa,G=79.38GPa,β= 0.166,按Misses屈服条件计算。则65导轨的弹性极限转矩为
65导轨弹性阶段最大扭转角为
65导轨塑性极限转矩为
3. 导轨校扭方法
根据计算,65导轨的弹性极限转矩是7 728N·m,塑性极限转矩是14 108N·m,因此校扭时设备需要提供的导轨校正扭力Tz为7 728N·m<Tz<14 108N·m。设备输出的扭力较大,可采用蜗杆传动得到很大的单级传动比,并且工作平稳无噪声,具有反行程自锁特点。布局上可采取二级传动,如图1所示,第一级通过带轮传动,第二级通过蜗杆传动。
(1)蜗轮蜗杆传动。考虑蜗杆传动功率不大,速度为低速,故蜗杆选用40Cr,因希望效率高些、耐磨性好些,故蜗杆螺旋齿面要求淬火,硬度为45~55HRC,采用渐开线(ZI)蜗杆。蜗轮用铸锡磷青铜ZCuSn10PI,金属模铸造。为了节约贵重的有色金属,仅齿圈用青铜制造,而轮芯用45钢制造。
按齿面接触疲劳强度进行设计,传动中心距a由下式计算
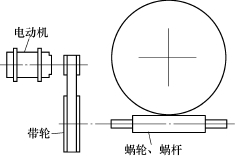
图 1
式中,ZE为材料的弹性影响系数,对于青铜与钢蜗杆匹配时,取ZE=160;ZP为接触系数,先假设蜗杆分度圆直径d1和传动中心距a的比值![]() ,查图得ZP=2.8(见图2);KA是使用系数,KP是齿向载荷分布系数(当载荷均匀时取KP=1,不均匀时取KP=1.3~1.6),KV为动载系数(当V2≤3m/s时,取KV=1.1~1.2,此处取KV=1.15); T2=Ts=14 108 N·m;σH=268MPa。
,查图得ZP=2.8(见图2);KA是使用系数,KP是齿向载荷分布系数(当载荷均匀时取KP=1,不均匀时取KP=1.3~1.6),KV为动载系数(当V2≤3m/s时,取KV=1.1~1.2,此处取KV=1.15); T2=Ts=14 108 N·m;σH=268MPa。
计算可得
查《机械设计手册》,取中心距a=400mm;传动比i=63;模数m=10;蜗杆分度圆直径d1=160mm。此时![]() ,查图2得 ZP1=2.7,因为ZP1<ZP,所以计算结果可用。
,查图2得 ZP1=2.7,因为ZP1<ZP,所以计算结果可用。
(2)带轮传动。确定带轮的传动比,先考虑电动机的选型,选择输出转矩较大的步进电动机,可以减小带轮传动比。在这里选择步进电动机130HS27,输出额定转矩为27 N·m。
因此,带轮传动比i2为
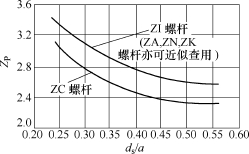
图2 圆柱蜗杆传动的接触系数ZP
考虑传动效率及理论误差,可取i2=10。
得到带轮传动比,就可根据实际应用时的转速及传递功率,选择合适的带轮型号,本文选择带轮为HTD-5M-30和HTD-5M-300。
4. 结语
本文以矩形杆件转矩理论,计算出导轨弹塑性极限转矩,依据此选择合适的转矩传动方法。由此方法理论指导的校扭设备在我司生产制造并使用验证,可满足实际生产需要,降低了劳动强度,提升了产品质量。


