
摘 要:本文研究分析了电梯轿厢振动、电梯系统参数、导轨平顺度等之间的相互关系,结果发现:导轨不平顺是轿厢振动的主要激励源。对此本文设计了一款高精度、多参数的电梯导轨不平顺度的测量系统,对电梯检修、维护以及保证其安全运行具有参考作用。
关键词:导轨不平顺度;光电传感器;激光准直技术;ARMA模型
引言
电梯作为高层建筑物中的垂直升降工具已被广泛使用。电梯是由机械、电气、控制三部分组成的复杂系统,随着建筑物的建设高度和电梯运行速度的不断增加,运行过程中,电梯轿厢的振动也受各种因素影响而变化[1]。如果轿厢的振动频率与其固有频率相接近就可能出现共振现象,这不但会降低电梯的舒适度,甚至会发生严重的安全事故[2]。本文通过建立电梯导轨不平顺度的统计学模型,揭示轿厢震动与导轨不平顺度之间的内在联系。
1 导轨侧面不平顺度数据分析
导轨侧面不平顺度是指导轨在侧面表现出的误差,天津某电梯公司测试导轨的侧面不平顺度数据曲线[3-5],如图1所示。
该曲线数据是通过最小二乘直线拟合得到不平顺度的拟合曲线和两条与其平行的直线,求得两直线的间距即为侧面不平顺度数据的直线度误差。设两条平行直线分别为y=ax+b1和y=ax+b2,则直线度误差为:
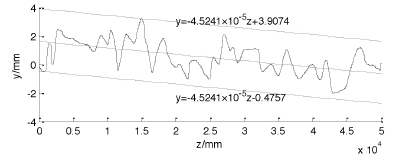
图1 导轨的侧面不平顺度数据曲线
把图1中数据带入式(1)中即可得到直线度误差为:4.3831mm。
对图1中的导轨侧面不平顺度数据进行随机过程的特征分析得到如图2(a)所示的概率密度函数曲线,在进行A R M A建模后得到模型ARMA(30,29),不平顺度是电梯导轨高度与测量误差之间的随机过程,而不是一般的随机时间过程,所以其功率谱密度曲线横坐标的单位为m-1,只要在横坐标数据的基础上乘以测量装置的运行速度(0.5m/s)就可以得到传统意义上的功率谱密度曲线横坐标的单位s-1,即HZ。导轨侧面不平顺度数据的归一化自相关函数曲线和功率谱密度曲分别如图2(b)和图2(c)所示。
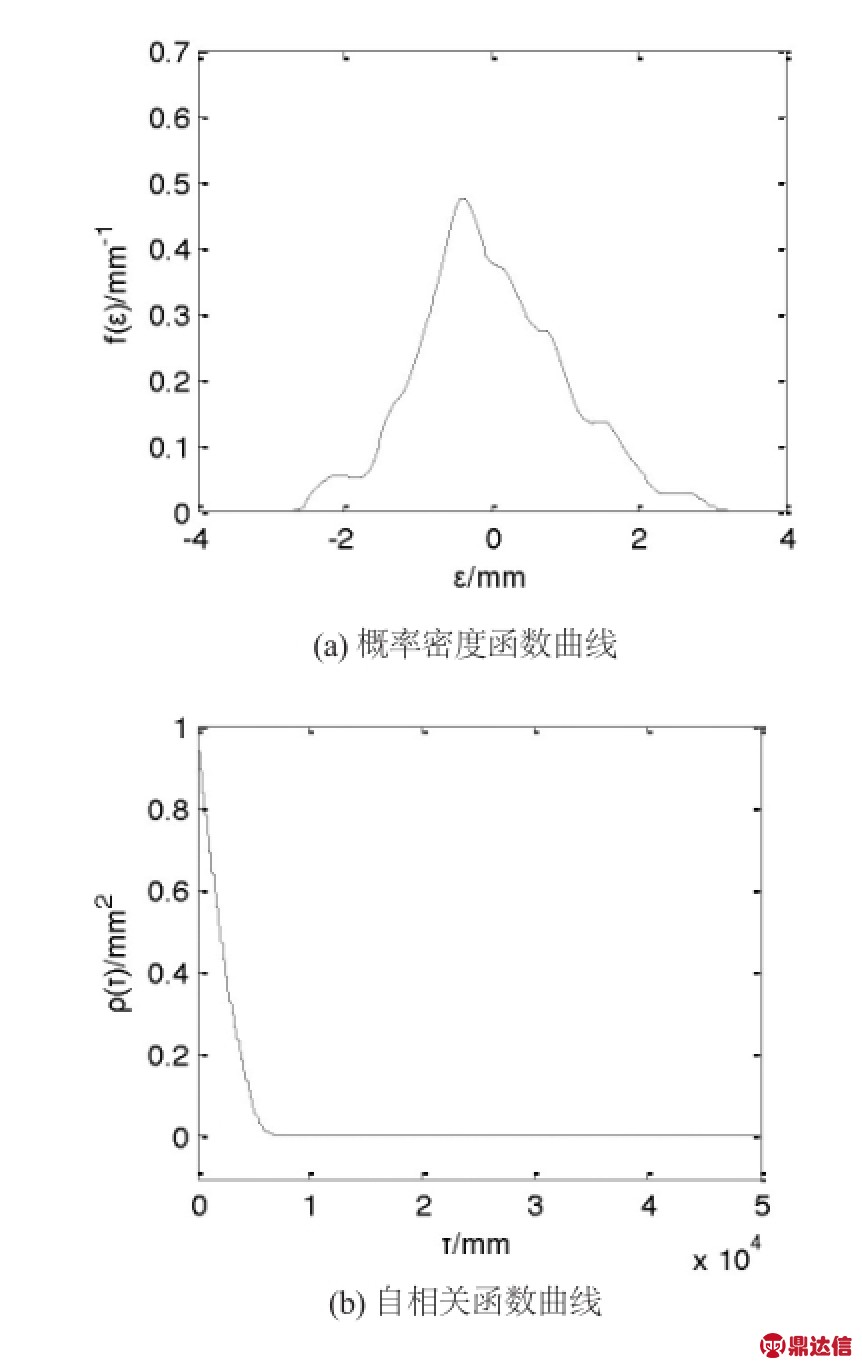
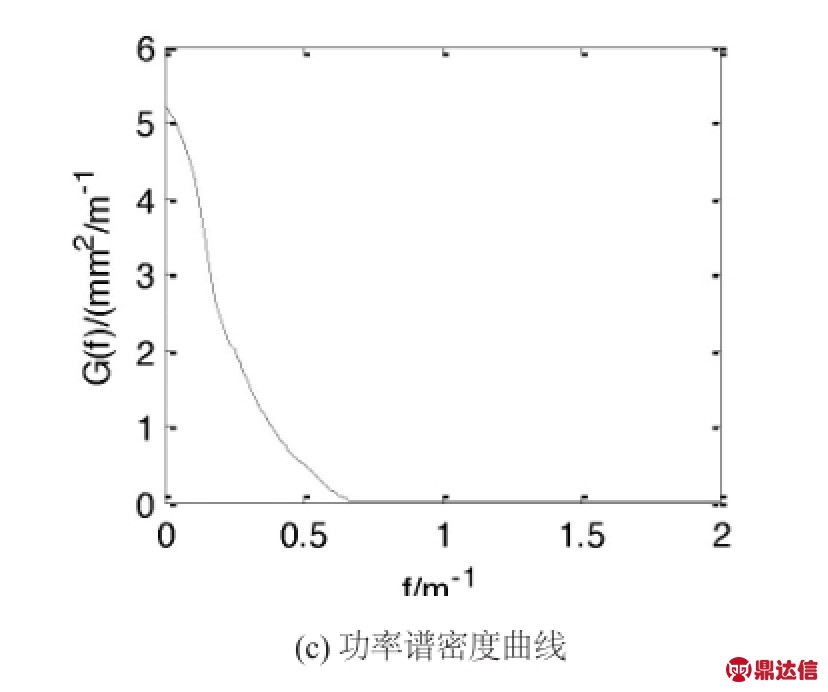
图2 导轨侧面不平顺度数据分析
从图2(a)可以看出导轨侧面不平顺度数据呈现单峰近似对称的分布状态,主要分布在-2到2的区间内。从图2(b)可以看出自相关函数随着距离的增加而减小并趋于零,这说明随着距离的增大数据相关程度减少,反映出平稳随机过程的各态历经性。从图2(c)可以得到导轨侧面不平顺度数据的功率谱密度主要集中在0.6m-1内。
2 导轨顶面不平顺度数据分析
导轨顶面不平顺度是指单根导轨工作顶面的起伏变化情况,其主要由安装过程中基准的偏差和井道变形引起,其不平顺度数据曲线[6-8],如图3所示。

图3 导轨的顶面不平顺度数据曲线
根据公式(1)计算得到顶面不平顺度数据的直线度误差为:3.2817mm。对导轨顶面不平顺度数据进行随机过程的特征分析,得到如图4(a)的概率密度函数曲线;进行ARMA建模后得到模型ARMA(34,33),导轨顶面不平顺度数据如图4(b)归一化自相关函数曲线和功率谱密度曲线如图4(b)和图4(c)所示。

图4 导轨顶面不平顺度数据分析
由图4(a)可以看出,导轨顶面不平顺度数据的概率分布呈现出一定的单峰对称性,其方差为0.1767mm2,而图2(a)的方差为0.1486mm2,说明导轨顶面不平顺度比侧面不平顺度的波动大。
由图4(b)可以看出导轨顶面不平顺度数据的自相关函数随着距离的增加而减少为零,但与图2(b)不同的是其呈现出一定的波动性,说明导轨顶面不平顺度含有一定的周期性变化成分,这一点也将在功率谱密度曲线上表现出来。
从图4(c)可以看出导轨顶面不平顺度数据的功率主要分布在0-0.5m-1的低频范围内,与图2(c)不同的是其出现了一个峰值2.408,峰值频率为0.1897m-1,波长为5.2715m。说明导轨长度(单根5m)是造成不平顺度呈现周期变化的主要因素。
3 测量系统
测量系统如图5所示。在测得导轨的不平顺度信息后,需要对信息所在的位置进行确定,以便工作人员对导轨进行校正,并为后期建立模型做准备[9-10]。行程测量装置是由高精度的滚动轴承和编码器组成,运行过程中其与轿厢连接在一起,轴承和导轨完全接触。测量开始后通过记录编码器的计数脉冲就可以得到其转动圈数,另外轴承的半径是已知的固定量,通过计算即可得到行程测量装置的实时位置。
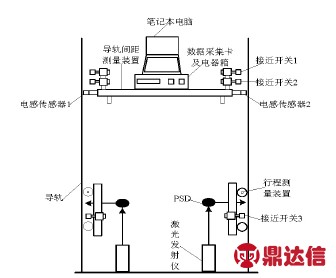
图5 测量系统结构图
电梯导轨是由每根5米的标准导轨组成,在安装过程中导轨与导轨之间的连接处会因为外在因素产生台阶和失调,两列导轨会出现间距不等的情况,这些都是轿厢振动的激励源,为了避免这种情况的发生,并便于后期校正维修,设计了一个测量装置:导轨间距及接头测量装置,它是由接近开关和电感式传感器组成。导轨间的连接是由螺栓和连接板完成,只要用接近开关确定了螺栓的位置也就找到了导轨的连接处,即台阶和失调可能存在的位置。导轨间距是通过两个电感式传感器差动方法进行测量,两个电感式传感器分别被放置在一固定横梁的两端,由于横梁机械强度比较大,认为横梁是刚体在运动过程中不发生形变,由于是差动的测量方法,轿厢在左右晃动时一侧的测量结果会增加而另一侧会相应的减少,叠加以后就不会影响测量的结果。
4 结束语
针对PSD传感器输出的电流信号与入射光照射位置之间存在非线性的问题,在双一次插值法的基础上提出了一种任意四边形的双一次插值法,对其进行非线性修正。在测量数据的基础上,通过随机过程的有关分析对数据做A R M A模型构建,从概率密度对数据进行研究,揭示了导轨不平顺度的内在随机特征,分析了特征的相关物理背景。


