
摘要 轨道交通车辆在过分相或无电区过程中将逆变器脉冲封锁,车辆进入惰行工况,惰行结束后再次起动逆变器进行牵引电机的带速重投。在采用无速度传感器控制时,由于重投时刻电机的实际速度未知,带速重投成为需要解决的关键问题。本文提出一种基于积分滑模的感应电机无速度传感器带速重投控制策略。建立基于转子反电动势的非线性系统模型,设计积分滑模控制策略,准确估算电机在重投时的初始转速,并采用合理的切换函数减小系统抖振。理论分析积分滑模控制的稳定性和对电机转子时间常数的鲁棒性。仿真和实验验证了该方法的有效性,并和原有的输入输出线性化方法进行对比,仿真和实验结果表明该方法在带速重投过程中具有更好的动态性能和良好的鲁棒性。
关键词:感应电机 无速度传感器控制 带速重投 积分滑模
0 引言
无速度传感器控制的研究已经开展了许多年,并取得了一定的研究成果,去掉速度传感器能够减少牵引传动系统的成本,为更大功率的牵引电机节省安装空间,同时消除了速度传感器引起的系统故障,提高了系统运行的可靠性[1-4],在工业上有着广阔的应用前景,特别是轨道交通领域。在无速度传感器控制技术的应用中带速重投是需要解决的关键问题[5-10]。例如轨道交通车辆在过分相或无电区过程中将逆变器脉冲封锁,车辆运行在惰行工况,当惰行工况结束时,逆变器重新起动,牵引电机则需要进行带速重投。带速重投控制的关键在于重投时刻电机初始转速的估算。如果估算的初始转速和实际转速存在较大偏差,重投时刻就不能成功实现磁场定向控制,进而导致系统过电流或过电压,严重时可能导致车辆机械传动部件的损坏。
对于感应电机在无速度传感器控制时的带速重投问题,国内外学者已经进行了一些相应的研究。文献[7]提出了在重投过程中采用频率搜索的方法进行初始速度的估算,根据稳态下电机的电压-频率特性,从最大的定子频率开始搜索,这种方法频率搜索所需的时间较长,而且搜索过程中会产生一定的牵引转矩。文献[8]中给感应电机d轴注入直流电流,通过测量q轴电流的振荡周期来获得电机的初始转速,这种方法在速度越低时所需的时间越长。文献[9]中利用注入直流电流后转子磁链的二阶微分进行初始转速的估算,磁链的计算依赖于电机参数的准确性,另外二阶微分对噪声比较敏感。文献[10]利用定子电流Heyland圆的原理,采用折半查找的搜索方法估算初始速度,这种方法所需时间较长,还需要通过磁场控制使得重投过程的电流冲击在允许范围内。文献[11,12]提出了利用全阶观测器带速重投的方法,通过分析估算转速的收敛条件设计出合理的观测器增益矩阵,并采用模型预测控制,准确地估算出了电机初始转速,但该方法依赖于准确的电机参数。学者Keiichiro Kondo提出了基于转子反电动势的带速重投方法,当估算转速收敛到实际转速时d轴转子反电动势收敛到零,文献[2,13]中设计了PI控制器估算重投时刻的初始转速,由于低速和高速时转子反电动势的大小不同,固定的控制器参数不能同时满足低速和高速的动态性能。文献[14,15]中提出了一种基于转子反电动势非线性模型的输入输出线性化方法,重投过程中能够准确快速地估算出电机转速,但是估算转速存在一定的超调。另外由于转子反电动势非线性模型建立的过程中忽略了定子电流的变化,可能会造成建模的不准确,而输入输出线性化的方法本身对于模型不准确、参数不确定和扰动的鲁棒性较差,可能会导致估算转速的不准确,进而使得重投失败。
本文以转子反电动势非线性模型为基础,针对输入输出线性化方法存在的问题,提出了一种基于积分滑模的感应电机带速重投方法,这种积分滑模方法能够减小模型不准确带来的影响,提高对电机参数变化的鲁棒性。本文给出了转子反电动势非线性模型建立的详细过程,并对原有的输入输出线性化方法进行介绍,针对其存在的问题设计了积分滑模控制器,并选择合适的切换函数减小系统的抖振现象,同时研究分析该方法的稳定性和对电机参数变化的鲁棒性。最后在7.5kW感应电机牵引传动平台上对该方法进行仿真和实验的验证。
1 非线性系统模型及输入输出线性化带速重投方法
1.1 基于转子反电动势的非线性系统模型
dq同步旋转坐标系下转子反电动势为[2]
 (1)
(1)
 (2)
(2)
式中,erd和erq分别为d轴和q轴转子反电动势;usd和usq分别为d轴和q轴定子电压;isd和isq分别为d轴和q轴定子电流;Rs为定子电阻;Ls和Lr分别为定子绕组的自感和转子绕组的自感;Lm为定、转子绕组互感;s 为漏磁系数, ;ws为同步角速度;
;ws为同步角速度; 为微分算子。
为微分算子。
根据定子电压方程和转子磁链方程可以得到定子电流动态方程为[16]

 (3)
(3)

 (4)
(4)
式中,yrd和yrq分别为d轴和q轴转子磁链;wr为转子角速度;Tr为转子时间常数,。
将式(3)、式(4)代入式(1)和式(2),假设转子速度wr保持恒定,并对erd和erq进行微分 得到
 (5)
(5)
 (6)
(6)
同步旋转坐标系下转子反电动势用转子磁链表示为
 (7)
(7)
 (8)
(8)
同步旋转坐标系下转子磁链动态方程为
 (9)
(9)
 (10)
(10)
将式(7)~式(10)代入式(5)和式(6),考虑到定子电流的动态响应速度大于转子反电动势的动态响应速度,转子反电动势变化的过程中认为定子电流保持不变,忽略定子电流微分项[15],得到同步坐标系下基于转子反电动势的非线性系统模型为
 (11)
(11)
(12)
由式(11)和式(12)所表示的基于转子反电动势的感应电机非线性系统模型可以整理成
(13)
式中,x1、x2为状态变量,x1=erd, x2=erq;u为系统控制输入,u=ws; ;
; ;
; ;
; 。
。
1.2 输入输出线性化带速重投方法
基于上述转子反电动势非线性模型,文献[15]提出了一种输入输出线性化带速重投控制策略。输入输出线性化方法的基本原理是构造一个新的输入,使系统输出 和新输入产生线性的微分关系。基本方法就是反复对系统输出求导,直到输入
和新输入产生线性的微分关系。基本方法就是反复对系统输出求导,直到输入 出现,然后设计来消除系统的非线性项。
出现,然后设计来消除系统的非线性项。
式(13)所表示的非线性系统的输出方程为
 (14)
(14)
对输出求导得到
 (15)
(15)
则控制规律可以设计为
(16)
式中, 。
。
这样输出和新输入之间成线性微分关系为
 (17)
(17)
当磁场定向准确时 ,根据输入输出线性化方法形成一个闭环系统,输入为d轴转子反电动势指令,输出为控制的d轴转子反电动势,结构如图1所示。重投过程中给定转差为零,转子转速等于同步转速,则估算转速由式(16)求得的
,根据输入输出线性化方法形成一个闭环系统,输入为d轴转子反电动势指令,输出为控制的d轴转子反电动势,结构如图1所示。重投过程中给定转差为零,转子转速等于同步转速,则估算转速由式(16)求得的 获得。
获得。
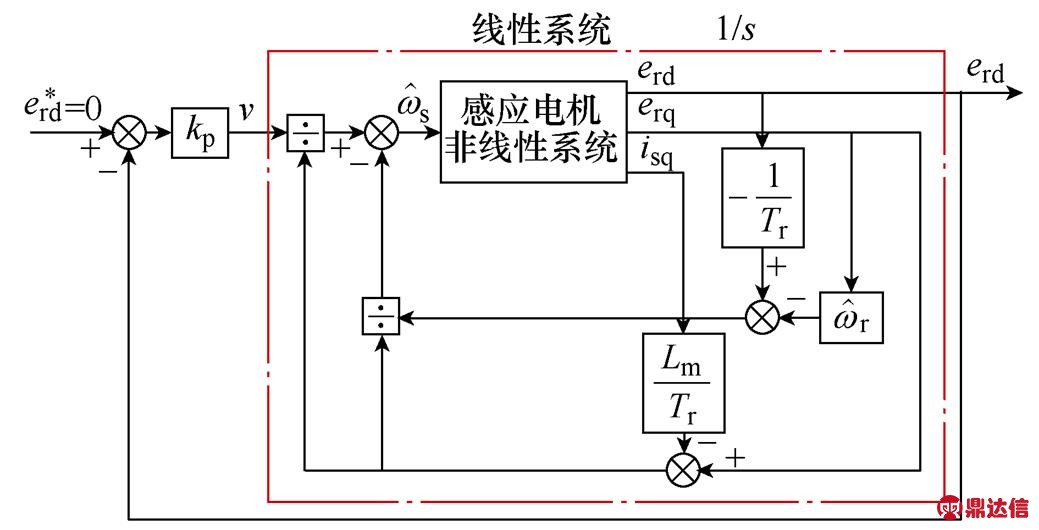
图1 输入输出线性化结构框图
Fig.1 Schematic diagram of input-output linearization
定义跟踪误差为 ,上述闭环系统的误差状态方程为
,上述闭环系统的误差状态方程为
 (18)
(18)
如果kp为正实数,则误差状态方程的极点位于复平面左半平面,误差指数收敛于0。
虽然输入输出线性化后的系统是一个指数稳定的误差系统,但是该方法只能使得闭环系统局部渐近稳定,而且当有不确定的参数或未建模的系统动态时,不能保证其鲁棒性[17]。
2 积分滑模带速重投控制设计
2.1 积分滑模控制基本原理
非线性系统建模的过程中往往会做一些简化或者忽略某些因素,输入输出线性化的方法不具备模型不准确和参数变化的鲁棒性。而滑模控制作为一种鲁棒控制方法通过设计滑模面并进行不连续控制,不仅具有快速的动态响应,而且对参数变化和扰动都有着良好的鲁棒性。相比传统的滑模控制,积分滑模控制的滑模面动态方程的阶数等于非线性系统方程的阶数,能够保证从初始时刻开始整个响应过程中系统的鲁棒性[18,19]。
考察一个单输入动态系统
 (19)
(19)
式中, 是状态变量;是控制输入;函数f(x)和控制增益b(x)是非线性的,其中含有不确定的参数[17]。
是状态变量;是控制输入;函数f(x)和控制增益b(x)是非线性的,其中含有不确定的参数[17]。
为了使式(19)表示的动态系统的状态x跟踪特定的时变状态,设计一个时变的积分滑模面,用下面的标量方程表示为
 (20)
(20)
式中, ,为系统状态和期望状态之间的误差;
,为系统状态和期望状态之间的误差; 为正常数。
为正常数。
系统轨线在滑模面上的滑动条件为满足李雅普诺夫稳定性,即
 (21)
(21)
式中, 为正常数。
为正常数。
2.2 带速重投控制策略设计
基于转子反电动势非线性系统模型式(13)进行带速重投控制的设计。在进行带速重投的过程中,电机的实际转速wr是未知的,则式(13)函数f(x)是不确定的。根据转子磁场定向控制的理论,如果估算的电机转速接近实际的电机转速,磁场定向准确时,d轴转子反电动势收敛到零。所以,带速重投过程中控制的目标转变为使得d轴转子反电动势erd跟踪期望的目标轨迹即erd=0。跟踪误差为
 (22)
(22)
由于式(13)表示的非线性系统模型为一阶系统,根据2.1节所述,积分滑模面动态方程的阶数等于非线性系统方程的阶数,因此根据式(20)滑模面可以设计为
 (23)
(23)
系统在滑动面上的动态可写成
 (24)
(24)
由式(13)和式(23)可得
(25)
将式(25)代入式(24)得到滑模面上的等价控 制,即
 (26)
(26)
式中,是使得系统运动在滑模面上的最佳估计。
由于函数f(x)存在不确定性,为了满足如式(21)所示的滑模条件,在穿越滑模面 时,在上加上一不连续项,构成的不连续控制规律为
时,在上加上一不连续项,构成的不连续控制规律为
 (27)
(27)
式中, 为符号函数;
为符号函数; 的选取将在后面给出。
的选取将在后面给出。
考虑到模型的不准确和干扰的存在,滑模控制的控制规律在穿过滑模面时设计为不连续,这种不连续的切换控制将不可避免地产生抖振,而在实际工程应用中是不希望出现抖振的。为了减小抖振,通常将符号函数替换为饱和函数,而这里采用相较于饱和函数更为平滑的sigmoid函数来减小系统的抖振现象[20]。sigmoid函数的表达式为
(28)
式中,为正常数,决定边界层的厚度,如图2所示。
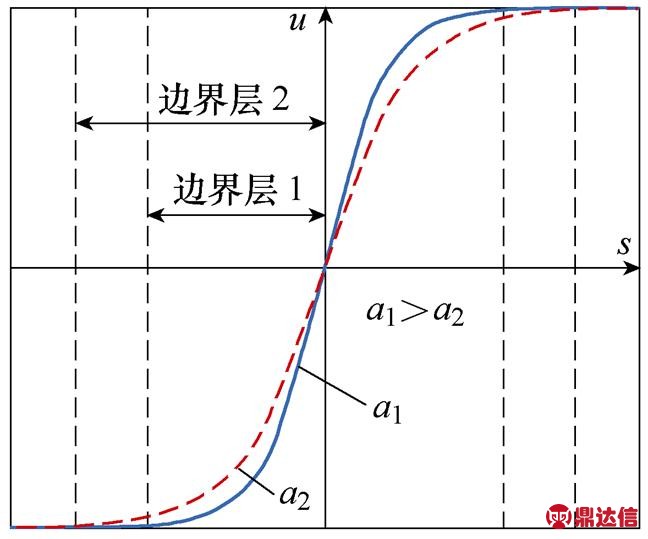
图2 sigmoid函数控制规律示意图
Fig.2 Diagram of sigmoid function control law
为了减小抖振,取一个尽可能小的值,但是取值过小会降低滑模控制的鲁棒性和控制精度,甚至会破坏滑模结构。另外,减小抖振会相应地限制控制器增益或者带宽,但是带速重投过程中期望有快速的动态响应,使得估算转速能够尽快地跟踪上实际转速。因此在重投过程中取较大的值,在估算出初始转速之后,的取值相应减小。
通过上述研究分析,采用积分滑模控制的速度估算为
 (29)
(29)
式(29)中转子反电动势可以通过式(1)和式(2)计算得到。重投过程中转矩指令给零,可以认为,则转差为零,估算的同步转速等于电机转子的转速。
将上述积分滑模控制应用到感应电机无速度传感器控制中,其结构框图如图3所示。采用转子磁场定向矢量控制,电流控制器采用传统的PI控制器,采用前面设计的积分滑模控制器估算电机转速。由于采用了sigmoid函数用来减小系统的抖振现象,为了提高带速重投过程中转速估算的动态响应,快 速地估算出电机的初始转速,在计算角度的时候不经过低通滤波器。而为了获得平滑的指令,对用于计算指令的转速 进行低通滤波。
进行低通滤波。
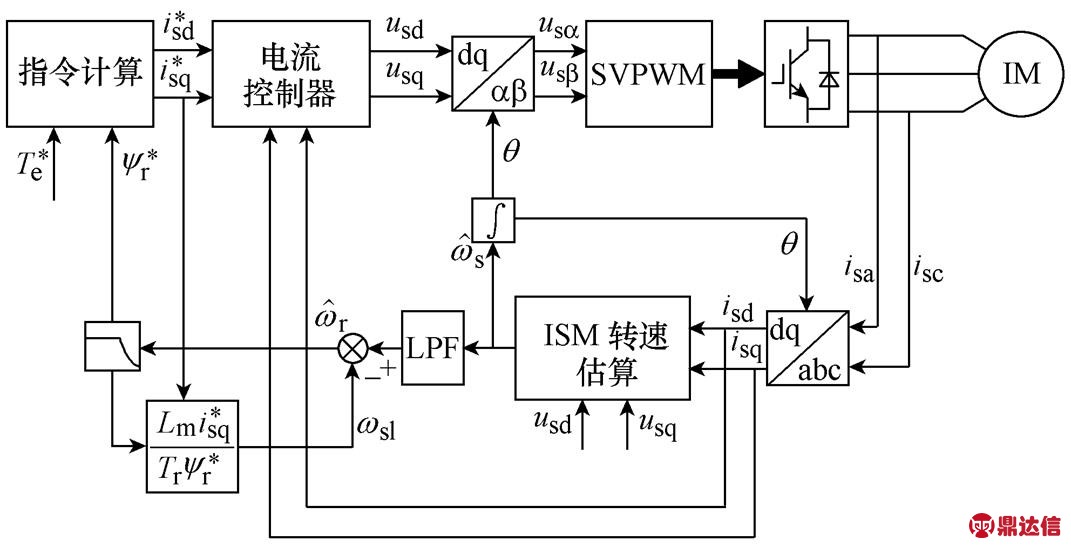
图3 无速度传感器控制系统结构框图
Fig.3 Schematic diagram of the speed sensorless control
3 控制系统稳定性及转子时间常数鲁棒性分析
3.1 控制系统稳定性分析
滑模控制系统的稳定性可以通过李雅普诺夫稳定条件进行判断。将式(25)和式(27)代入滑动条件式(21),得到不等式
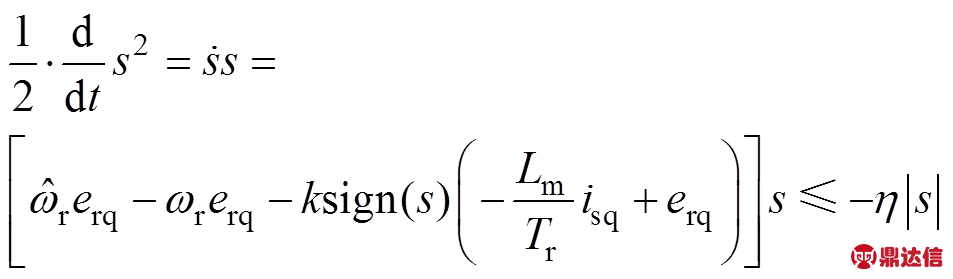 (30)
(30)
重投过程中认为,并且 ,式(30)可以简化为
,式(30)可以简化为
(31)
由于牵引电机的实际转速未知,重投过程中估算转速的初始值设定为0,电机运行的最大转速定义为 ,则有不等式
,则有不等式
 (32)
(32)
根据式(31)和式(32),不连续控制中系数的取值设计为
(33)
在控制中选取如式(33)所示的参数,则滑模面始终满足由式(30)给出的李雅普诺夫稳定条件。
3.2 转子时间常数鲁棒性分析
在实际应用中电机参数会随着温度的变化而变化,如果不进行参数的辨识,就不能得到准确的电机参数。式(13)所表示的非线性系统模型和用来估算转速的式(29)中涉及到的电机参数为互感Lm和转子时间常数Tr,在不考虑磁饱和的情况下,认为互感Lm是基本不会变化的,这里主要分析转子时间常数的鲁棒性。
式(11)和式(12)看作电机理想的非线性模型,控制的非线性模型的方程表示为
 (34)
(34)
(35)
式中,为控制中的转子时间常数,和准确的转子时间常数Tr之间存在偏差。
式(11)和式(34)相减,并将式(29)代入得到
 (36)
(36)
当系统轨线运行到滑模面上时,实现控制目标使得,则有

(37)
从式(37)中可以看出不准确的转子时间常数只出现在用于切换控制的不连续项中,所以转子时间常数带来的误差能够通过滑模的不连续控制得到校正,其鲁棒性也就能够得到保证。
4 仿真与实验
在7.5kW牵引传动平台上分别进行输入输出线性化重投方法和积分滑模重投方法的仿真和实验研究,验证积分滑模重投方法的有效性,并和输入输出线性化重投方法进行对比。
4.1 仿真结果
利用Matlab/Simulink搭建系统仿真模型,仿真中逆变器的开关频率为2.5kHz,为了减小数字控制的计算延时,提高系统的动态响应,采取在一个载波周期内双电流采样和双PWM占空比更新的控制策略,控制频率为开关频率的2倍即5kHz。仿真时重投过程中转矩指令为零,磁链指令为额定磁链值。仿真中用到的电机参数与实验电机参数相同,见表1。
表1 感应电机参数
Tab.1 The parameters of induction motor

输入输出线性化带速重投方法,估算转速式(16)中控制器参数kp=15,图4和图5为转子频率为20Hz时重投仿真的结果。图4为重投过程中d、q轴转子反电动势波形,从图中可以看出d轴转子反电动势erd指数收敛到零。图5为重投过程中定子电流is及实际转子频率Fr和估算转子频率的波形,重投过程中定子电流平滑没有冲击,估算的转子频率有1.1Hz的超调,之后指数收敛到实际转子频率。
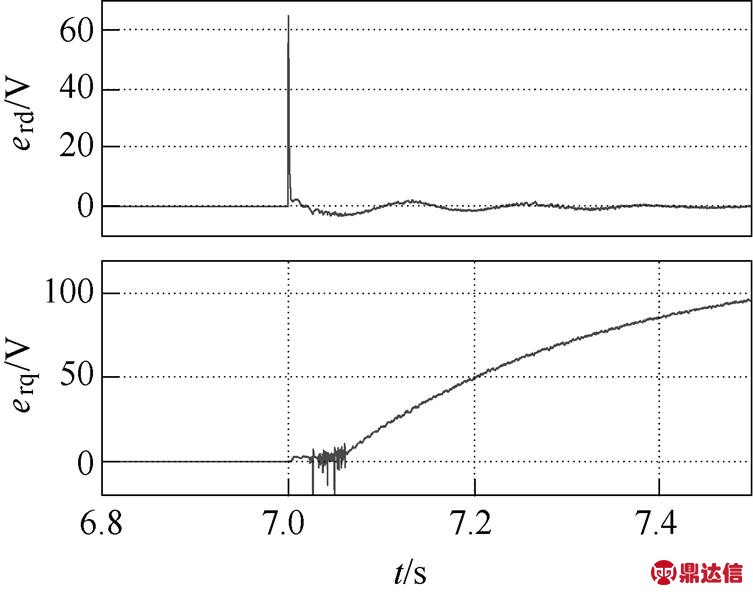
图4 输入输出线性化方法20Hz重投erd, erq仿真波形
Fig.4 Simulation waveforms of erd, erq restart at 20Hz with input-output linearization method
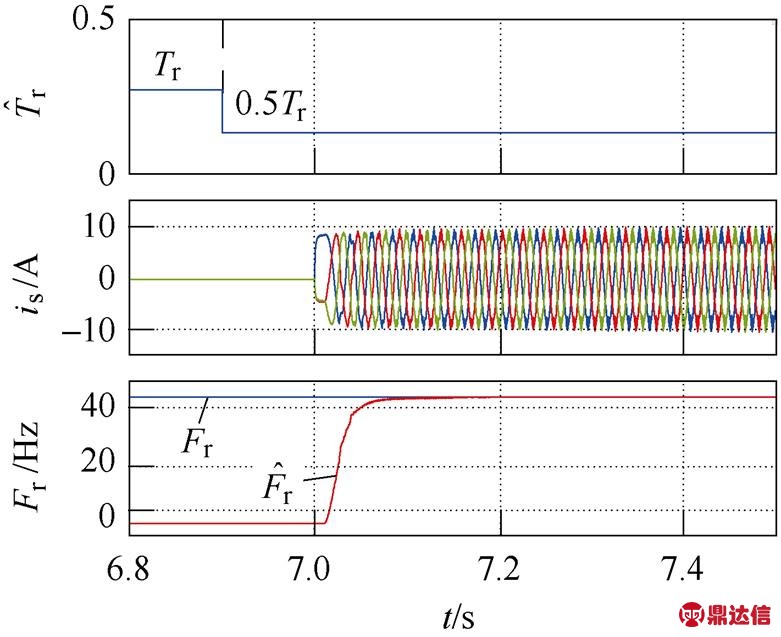
图5 输入输出线性化方法20Hz重投is和Fr仿真波形
Fig.5 Simulation waveforms of is and Fr restart at 20Hz with input-output linearization method
图6为输入输出线性化方法45Hz重投的仿真结果,d轴转子反电动势波形和20Hz重投时类似,这里不再给出。定子电流没有冲击,估算转子频率的超调为0.7Hz,之后也是能够指数收敛到实际转子频率,但是重投所需的时间比20Hz稍长。

图6 输入输出线性化方法45Hz重投is和Fr仿真波形
Fig.6 Simulation waveforms of is and Fr restart at 45Hz with input-output linearization method
积分滑模带速重投方法,估算转速式(29)中用到的各个系数分别取值为:, , 。重投过程中sigmoid函数中的系数,选取较大的值获得快速的动态响应。通过判断估算转速的微分绝对值是否小于设定的阈值来判断估算转速是否收敛到实际转速,阈值选择为400。当估算转速收敛到实际转速之后,系数。图7~图9为转子频率20Hz时重投仿真的结果。图7为重投过程中d、q轴转子反电动势波形,从图中可以看出d轴转子反电动势erd很快到达滑模面并开始抖振,通过调整sigmoid函数的参数可以很好地抑制系统抖振。图8为erd的相平面图,重投过程中erd的相轨线运动如图中箭头所示,放大图中7.005~7.08s系统轨线到达滑模面并出现抖振,7.08~7.5s系统轨线经过一段时间抖振后收敛到稳定的平衡点。图9为重投时的定子电流及实际和估算转子频率波形,从图中可以看出重投过程中电流无冲击,估算的转子频率能够在0.2s内快速地跟踪上实际转子频率,并且没有超调。
图10为积分滑模重投方法在电机转子频率45Hz时的仿真结果,d轴转子反电动势波形和20Hz重投时类似,这里也不再给出。从图中可以看出在速度较高时,估算的转子频率也能很快地从0收敛到实际转子频率且没有超调,电流平滑没有冲击,重投过程优于输入输出线性化重投方法。
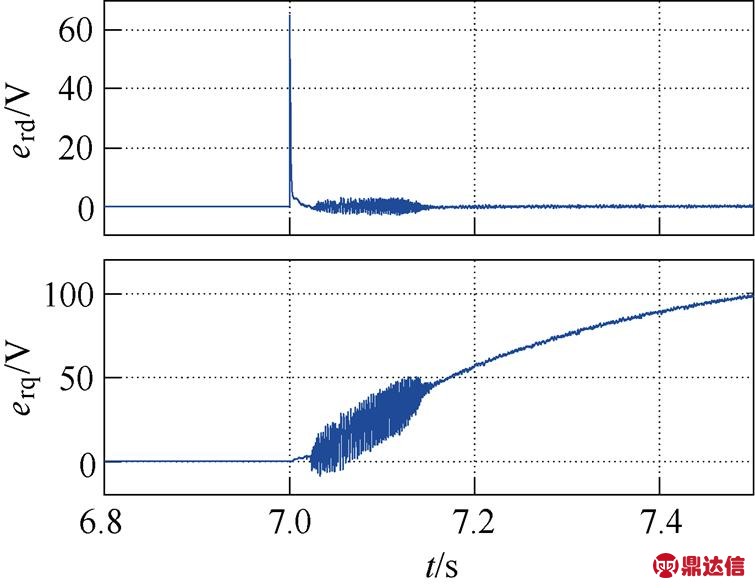
图7 积分滑模方法20Hz重投erd, erq仿真波形
Fig.7 Simulation wave of erd, erq restart at 20Hz with integral sliding mode method

图8 d轴转子反电动势相平面图
Fig.8 Phase-plane diagram of erd
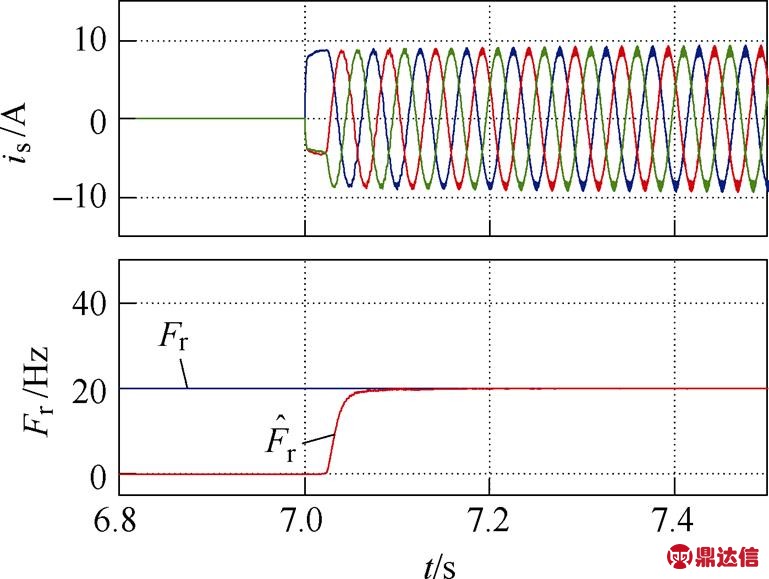
图9 积分滑模方法20Hz重投is和Fr仿真波形
Fig.9 Simulation wave of is and Fr restart at 20Hz with integral sliding mode method

图10 积分滑模方法45Hz重投is和Fr仿真波形
Fig.10 Simulation wave of is and Fr restart at 45Hz with integral sliding mode method
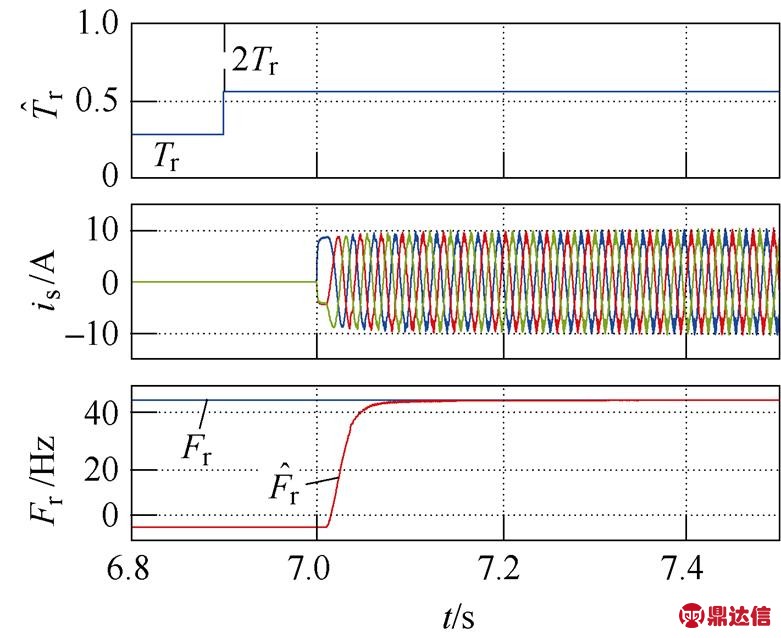
仿真转子时间常数Tr变化对两种重投控制方法的影响。图11和图12为控制用的转子时间常数存在误差时两种重投控制方法的仿真结果。图11为输入输出线性化重投方法在参数不准时45Hz重投的仿真结果,当控制用的转子时间常数减小到实际值的0.5倍时,估算的转子频率无法收敛到实际转子频率,当控制用的转子时间常数增大到实际值的2倍时,估算转子频率虽然能够收敛到实际转子频率,但是重投所需的时间变长。图12为积分滑模重投方法在参数不准时45Hz重投仿真结果,从图中可以看出控制用的转子时间常数无论减小到实际值的0.5倍还是增大到实际值的2倍,估算的转子频率都能快速准确地收敛到实际转子频率,且没有超调,很好地实现带速重投。相比于输入输出线性化重投方法,积分滑模重投方法对电机参数的变化有着更好的鲁棒性。

(a)减小到0.5倍

(b)增大到2倍
图11 输入输出线性化方法 存在误差时重投仿真结果
存在误差时重投仿真结果
Fig.11 Simulation results of restart with input-output linearization method when is inaccurate
(a)减小到0.5倍
(b)增大到2倍
图12 积分滑模方法存在误差时重投仿真结果
Fig.12 Simulation results of restart with integral sliding mode method when is inaccurate
4.2 实验结果
实验中的7.5kW感应电机的参数见表1,控制器采用TMS320F28335芯片,实验平台如图13所示。逆变器的开关频率为2.5kHz,实验中同样采用在一个载波周期内双电流采样和双PWM占空比更新的控制策略,控制频率5kHz。重投过程中转矩指令为零,磁链指令为额定磁链值。

图13 7.5kW感应电机实验平台
Fig.13 7.5kW induction machine experimental platform
图14和图15为输入输出线性化重投方法在电机转子频率为20Hz和45Hz时带速重投的实验结果,图中,Fr为实际转子频率,为估算转子频率。受实验条件的限制,定子电流is波形和转子频率波形不在同一时间坐标轴中,图中电流为1s内的实验波形;20Hz时重投所需时间较短,转子频率为0.5s内的实验波形;45Hz时重投所需时间较长,转子频率为1.0s内的实验波形。从实验波形中可以看出虽然重投过程中电流没有冲击,但是估算转子频率都会存在一定的超调,随着速度的升高重投所需的时间也会有所增加。
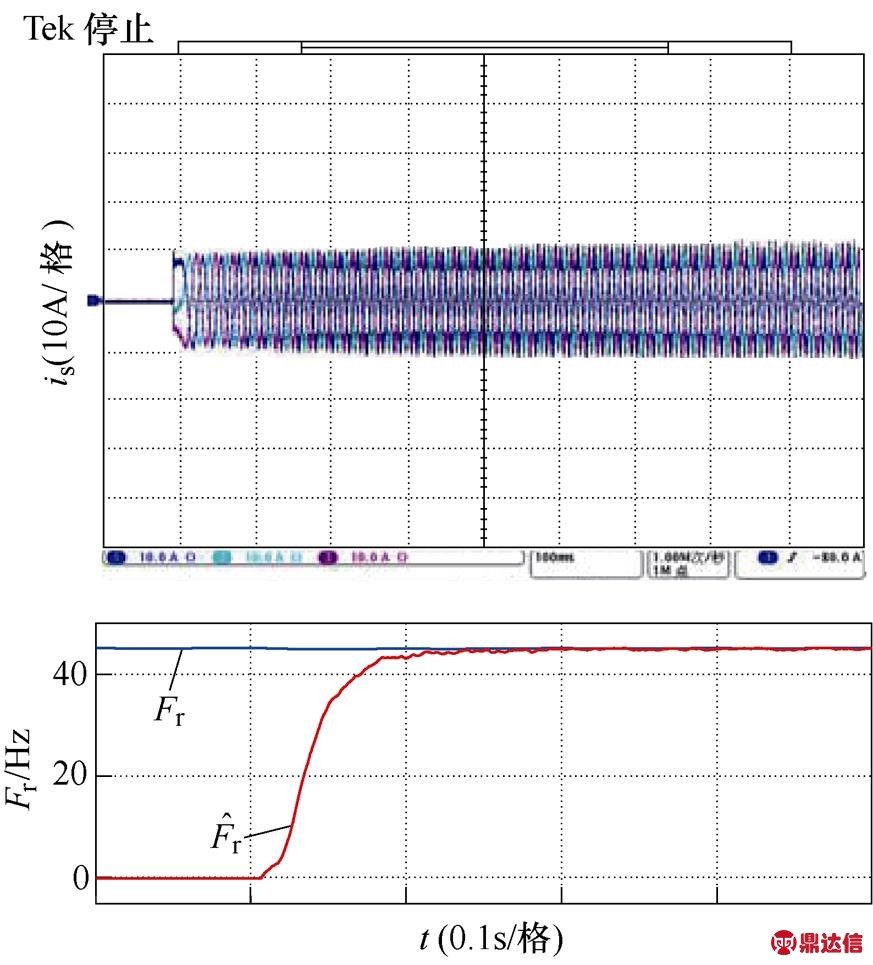
图14 输入输出线性化方法20Hz重投is和Fr实验波形
Fig.14 Experimental waveforms of is and Fr restart at 20Hz with input-output linearization method

图15 输入输出线性化方法45Hz重投is和Fr实验波形
Fig.15 Experimental waveforms of is and Fr restart at 45Hz with input-output linearization method
图16和图17为积分滑模重投方法在电机转子频率20Hz和45Hz时带速重投的实验波形。同样定子电流is波形和转子频率波形不在同一时间坐标轴中,图中电流为1s内的实验波形,转子频率均为0.5s内的实验波形。实验结果表明估算的转子频率能够很快地从0收敛到实际转子频率,并且没有超调。虽然45Hz时重投所需的时间较20Hz长,但也是在0.2s左右,重投所需的时间比输入输出线性化重投方法明显要短,而且估算转子频率跟踪实际转子频率的动态过程也更优。由于估算的转子频率从零收敛到实际值,电流基波的频率也逐渐增大,而采用异步调制开关频率固定不变,随着基波频率的增大载波比降低,所以电流的谐波有所增大。

图16 积分滑模方法20Hz重投is和Fr实验波形
Fig.16 Experimental waveforms of is and Fr restart at 20Hz with integral sliding mode method
图17 积分滑模方法45Hz重投is和Fr实验波形
Fig.17 Experimental waveforms of is and Fr restart at 45Hz with integral sliding mode method
图18和图19分别为转子时间常数存在误差时输入输出线性化重投方法和积分滑模重投方法的实验结果。图18a中控制用的转子时间常数减小到实际值的0.5倍时,估算转子频率没有收敛到实际转子频率,重投失败。图18b中控制用的转子时间常数增大到实际值的2倍,虽然重投成功,但是估算转子频率的超调比参数准确时略大。图19实验结果表明当控制中用到的转子时间常数为实际转子时间常数的0.5倍和2倍时,积分滑模控制方法都能快速准确地估算出实际的转子频率,对转子时间常数的变化具有良好的鲁棒性。

(a)减小到0.5倍

(b)增大到2倍
图18 输入输出线性化方法存在误差时重投实验结果
Fig.18 Experimental results of restart with input-output linearization method when is inaccurate

(a)减小到0.5倍
(b)增大到2倍
图19 积分滑模方法存在误差时重投实验结果
Fig.19 Experimental results of restart with integral sliding mode method when is inaccurate
5 结论
本文基于感应电机转子反电动势非线性模型,提出了一种用于无速度传感器控制系统中实现带速重投的积分滑模控制策略,给出了积分滑模控制器的设计过程和减小系统抖振的措施,并对控制系统稳定性和转子时间常数的鲁棒性进行了分析。通过仿真和实验验证了该方法的有效性,并和输入输出线性化方法进行了对比。仿真和实验结果证明,该方法在电机旋转过程中能够准确地估算出电机的实际转速,具有良好的动态响应,估算转速没有超调,电流没有冲击,并且对于电机参数的变化具有良好的鲁棒性,在实际应用中具有一定的适用性。


