
摘 要: 为提高电动汽车感应驱动系统PID控制精度,将鲸鱼优化算法与PID控制相结合,提出一种基于WOA算法的电动汽车用感应驱动系统控制器参数整定方法。为了获取高质量的控制效果,选择误差绝对值时间积分性能指标为适应度函数。结果表明,在电动汽车电动机PID参数寻优过程中,与PSO-PID、GA-PID和PID相比,WOA-PID控制器的超调量更小和响应时间更快,控制品质更高,能够更快地进入稳定状态。
关键词: 鲸鱼优化算法; 电动汽车; 控制器; 参数
随着纯电动汽车的发展,如何快速高效地开发电动汽车是当前研究的热点问题。纯电动汽车研发的关键技术主要有电动汽车整车技术、蓄电池技术、能量管理技术和电机及其控制技术。电动汽车的电机是其电气驱动系统的核心,电动汽车的性能直接由电机的控制技术、性能和效率决定。由于传统的PID (Proportion, Integral, Differential)控制算法可靠性高、稳定性好以及简单等优点,其被广泛地应用于工业控制领域,而传统PID控制的主要缺点在于其参数整定的适应性较差,由于电机系统的复杂性、非线性等问题,导致无法获得满意的控制效果[1]。
鲸鱼优化算法[2](Whale Optimization Algorithm,WOA)是受座头鲸捕食行为启发而提出的一种新型启发式算法,该算法具有调整参数少、操作简单和易于跳出局部最优能力强的优点。针对传统PID控制效果易受其参数选择的影响,提出一种基于WOA优化PID的电动
汽车感应电机驱动系统的控制器参数整定方法。研究结果表明,本文算法可以有效提高电机控制效果,具有精度高和误差小的优点。
1 鲸鱼优化算法
在WOA算法中,每只座头鲸的位置表示一个可行解,该算法具体描述如下[3]:
(1)环绕式捕食。座头鲸能够识别猎物的位置并进行包围。如果当前的最佳鲸群个体位置为目标猎物,则位置更新策略如下:D=|C·X*(t)+X(t)| (1)
X(t+1)=X(t)-A·D (2)
其中,A和C为系数;t为当前迭代次数;X(t)为当前鲸鱼的位置向量;X*(t)为当前最佳的鲸鱼位置向量。
A和C计算公式如下:A=2a·r1-a (3)
C=2r2 (4)
其中,r1和r2为随机向量,处于[0,1]之间;a值由2线性下降到0。
a=2-2t/Tmax (5)
其中,Tmax为最大迭代次数。
(2)发泡网攻击。该阶段主要机制有收缩包围机制和螺旋式位置更新,通过座头鲸气泡网建立数学模型,具体描述如下:
1)收缩包围机制:该机制通过减小a值实现,其中A是随机数,处于[-2,2]之间;当A处于[-1,1]之间时,新鲸群个体搜索位置是食物所在位置,此时鲸鱼靠近食物进行觅食;反之,则鲸鱼远离食物;
2)螺旋式位置更新机制:先计算鲸群个体与猎物的距离,之后为模拟座头鲸的螺旋游走行为,在二者之间创建一个螺旋数学模型,该模型如下: (6)
(6)
其中,D¢=|X*(t)-X(t)|为第i头鲸群个体当前最佳位置与猎物的距离;l为随机数,处于[-1,1]之间;b为对数螺旋形状参数。座头鲸在捕食猎物时,不但进行螺旋游动而且进行包围收缩,其在以50%的概率p在螺旋模型和收缩包围机制之间进行位置更新,其数学模型为:
 (7)
(7)
其中,p为随机数,处于[0,1]之间。
3)搜索捕食:当A>1或A<-1时,鲸群将进行移动搜索远离猎物,借此寻找一个更加合适的猎物,突出WOA算法在全局搜索中的勘探功能,数学模型如下:
D=|C·Xrand(t)-X| (8)
X(t+1)=Xrand-A·D (9)
其中,Xrand为从当前鲸群中随机选择的位置向量,也就是随机鲸群个体。
2 基于WOA的PID参数整定设计方案
2.1 PID控制
一般地,典型的PID控制框图如图1所示:
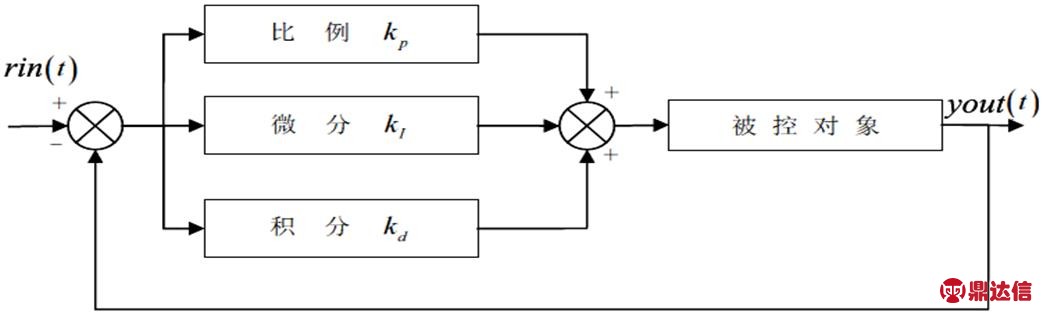
图 1 PID控制系统框图
Fig.1 PID control system block diagram
PID控制器的偏差公式为:e(t)=rin(t)-yout(t) (10)
其中,rin(t)、yout(t)分别表示输入值和输出值。
PID的控制规律表达式为: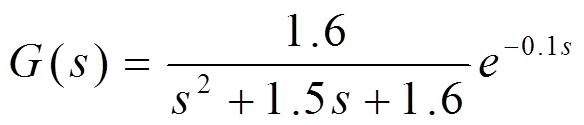 (11)
(11)
将公式(11)转化成传递函数形式为: (12)
(12)
其中,Kp、Ti、Td分别表示比例系数、积分时间常数和微分时间常数。
2.2 参数编码
令鲸群p中的搜寻个体数量为S,每个鲸群的位置矢量由PID控制器的3个参数构成[4],其矩阵表达式为:
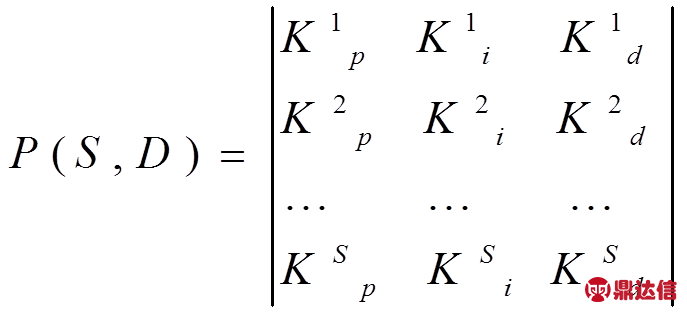 (13)
(13)
3 实证分析
为了考察WOA-PID算法在电动汽车感应电机控制系统中的有效性和可靠性,选择电动汽车电动机为控制对象[5],其传递函数为:
WOA参数设置如下:种群规模为30,最大迭代次数为100,其优化结果如图2和图3所示:
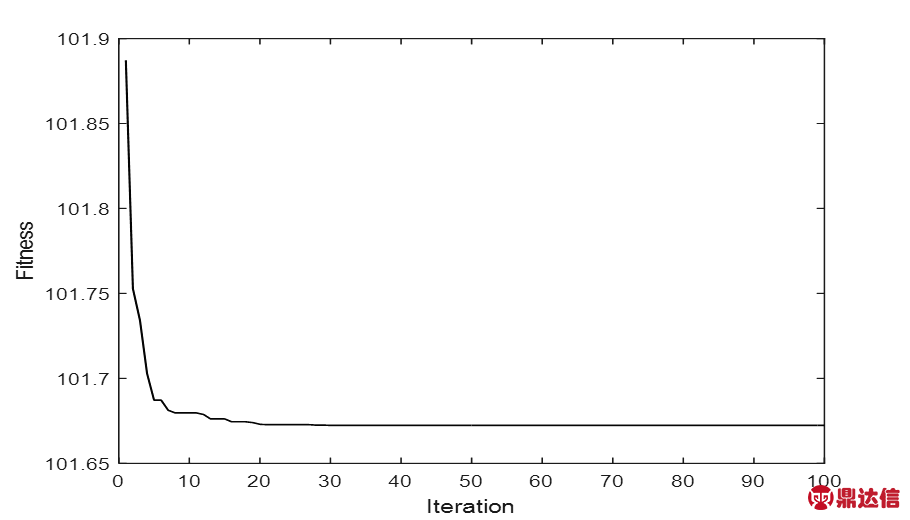
图 2 WOA优化PID适应度曲线
Fig.2 PID fitness curve optimized by WOA
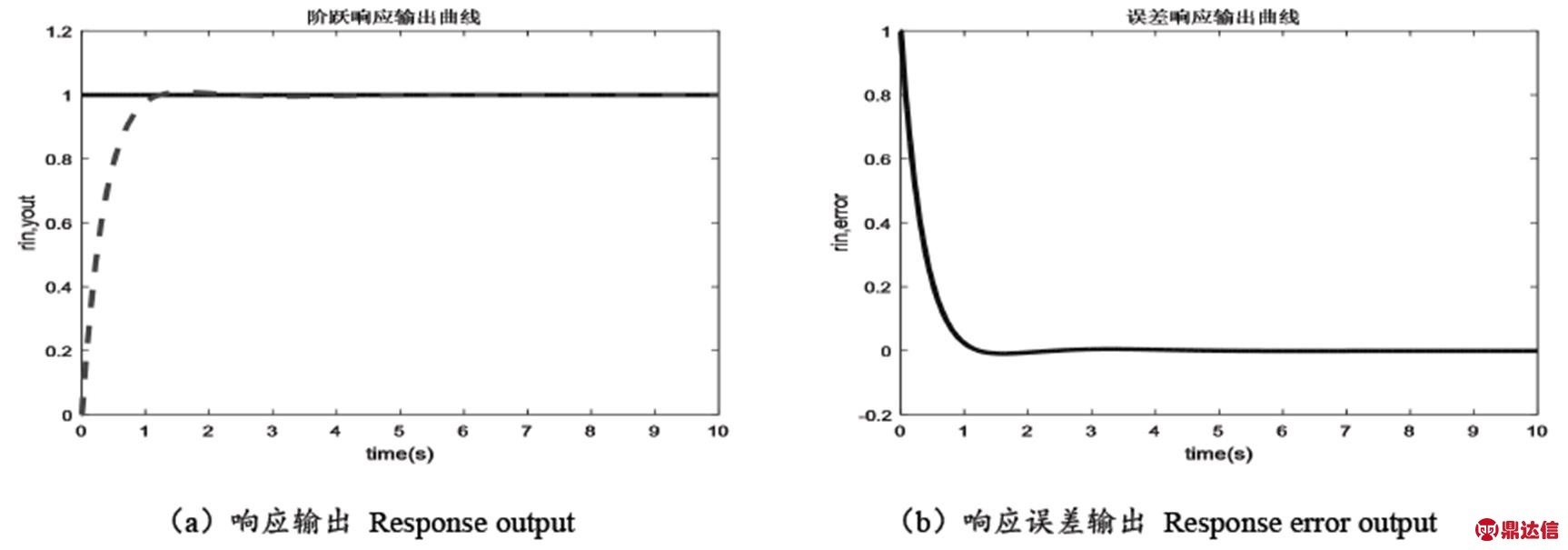
图 3 WOA优化阶跃响应曲线图
Fig.3 Step response curves optimized by WOA
为了验证WOA算法进行PID优化的效果,将WOA与GA (Genetic Algorithm)和PSO (Particle Swarm Optimization)优化PID的结果进行对比,不同算法参数设置表1所示。不同算法的阶跃响应输出曲线和阶跃响应误差曲线进行对比,其对比结果如图4和图5所示。
表 1 不同算法参数设置
Table 1 Parameter settings of different algorithms

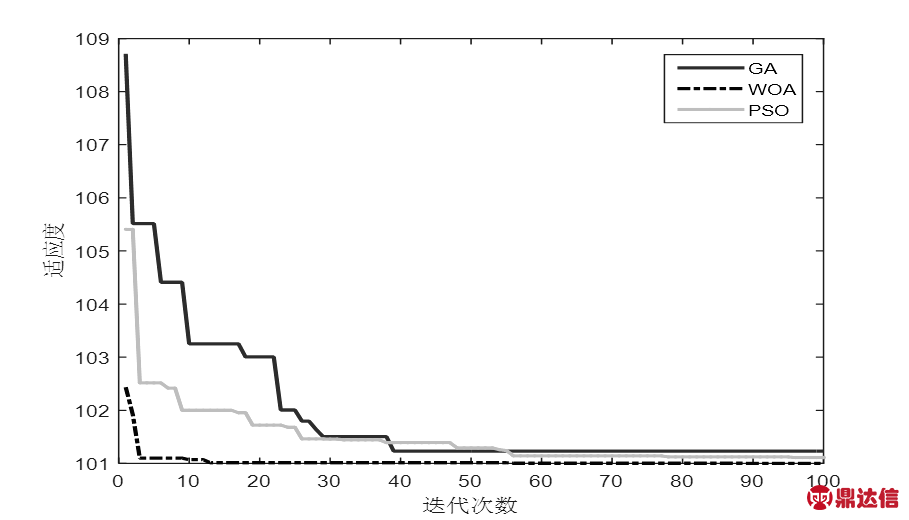
图 4 不同算法适应度收敛对比图
Fig.4 Comparison of fitness convergence of different algorithms
由图4可知,在电动汽车电动机PID参数寻优过程中,WOA算法与PSO算法和GA算法相比较,WOA算法具有更快的收敛速度,同时其优化结果也优于PSO算法和GA算法。
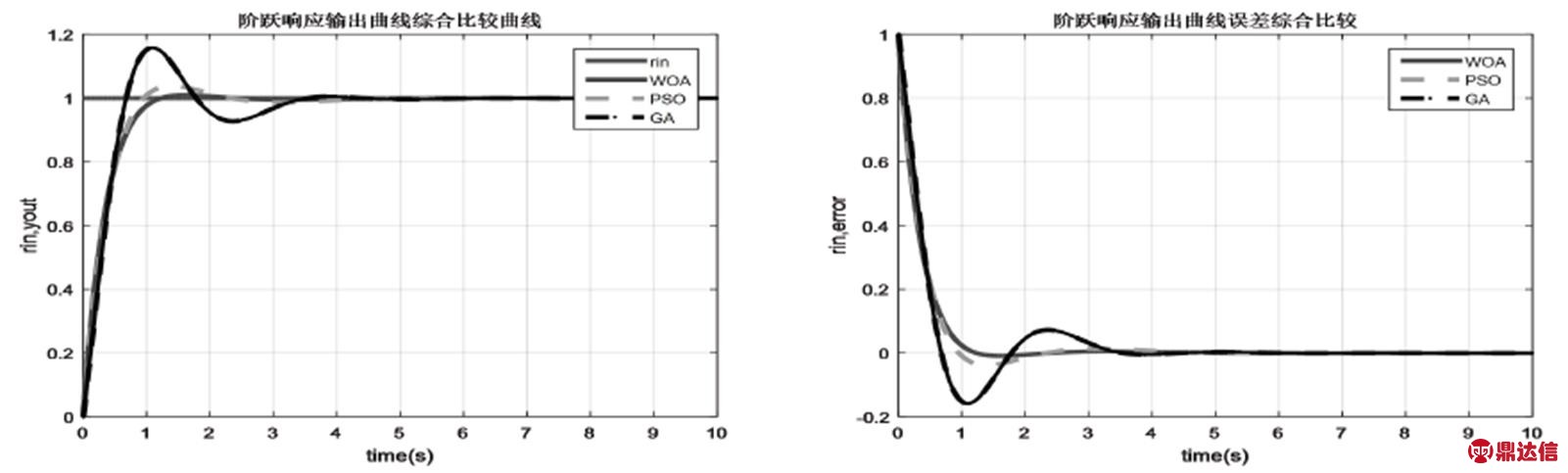
图 5 不同算法阶跃响应输出曲线
Fig.5 Step response output curves of different algorithms
由图5不同算法阶跃响应输出曲线可知,WOA算法与PSO算法和GA算法相比较,WOA算法具有更低的误差,从而体现出WOA算法进行电动汽车电动机PID参数寻优的有效性和可靠性。
表 2 PID参数和适应度函数值
Table 2 PID parameters and fitness function values

由表2适应度函数值可知,与PSO算法和GA算法相比较,WOA算法具有更高的精度,进一步验证了WOA算法进行电动汽车电动机PID控制的有效性和可靠性。
表 3 优化结果对比
Table 3 Comparison of optimization results

由表3可知,与PSO-PID、GA-PID和PID相比,WOA-PID控制器具有超调量更小和更快的响应时间,控制品质更高,能够更快的进入稳定状态。
4 结论
由于电机系统的复杂性、非线性等问题,导致传统的PID控制无法获得满意的控制效果。为提高电动汽车感应电动驱动系统PID控制精度,将鲸鱼优化算法引入电动汽车感应电动驱动系统PID控制,提出一种基于WOA算法的电动汽车用感应电动驱动系统的控制器参数整定方法。研究结果表明,在电动汽车电动机PID参数寻优过程中,与PSO-PID、GA-PID和PID相比,WOA-PID控制器具有超调量更小和更快的响应时间,控制品质更高,能够更快的进入稳定状态。


