
摘 要:针对以往在感应电机无速度传感器矢量控制中,全阶磁链观测器均是以静止坐标系下状态变量进行设计的,其基于欧拉法的离散化过程估算误差大,若采用梯形法、双线性法或龙格-库塔法,估算误差有所减小,但计算过程复杂,不适宜工程应用。提出以同步旋转坐标系下的定子电流和转子磁链作为状态变量来设计全阶磁链状态观测器,其离散化过程采用工程上常用的欧拉法,计算量小。同时给出了基于两种坐标系下全阶磁链观测器转速估算自适应律设计方法。仿真分析和实验结果对比表明,在低速和高速状态下,同步旋转坐标系下设计的状态观测器电流和转速估算准确快速,可以明显提高系统控制的精确性和实用性。
关键词:感应电机; 全阶磁链观测器; 离散化过程; 静止坐标系; 同步旋转坐标系
0 引 言
异步电机无速度传感器矢量控制技术已经得到了广泛的应用,全阶磁链观测器与转速估算理论是其中的关键技术和热点问题,受到工程界高度关注[1-4]。在全数字化驱动系统中,全阶磁链观测器是通过微处理器实现,连续全阶磁链观测器必须经过离散化处理[5],离散化方法有欧拉法[6]、梯形法、双线性法和龙格-库塔法等[6-8],不同的离散化方法会导致系统对电流和转速的估算精度不同。文献[1-7]所设计的全阶磁链观测器均是以静止坐标系下的定子电流和转子磁链作为状态变量,其离散化过程如果用欧拉法,在电机高速状态下估算误差大;如果采用双线性法、梯形法或龙格-库塔法等方法,则计算量庞大,较难工程实现,且系统动态响应过程变差。文献[8]仅仅讨论了d-q同步旋转坐标系下开环全阶磁链观测器的模型,未对闭环模型进行分析,文献[9]提出了一种改进闭环磁链观测器模型,但均是基于静止坐标系模型进行分析,存在较大的估算误差。
针对以上问题,本文提出以同步旋转坐标系下的定子电流和转子磁链作为状态变量进行全阶磁链观测器设计,其离散化过程采用欧拉法,计算量小,工程上容易实现。在离散化分析基础上给出了基于两种坐标系下全阶磁链观测器转速估算自适应律设计方法。仿真对比分析和无速度矢量控制实验结果表明,同步旋转坐标系下设计的全阶磁链观测器对电流和转速估算准确且快速,特别是在高速状态下,明显提高了系统控制的精确性、鲁棒性和实用性。
1 异步电机数学模型
异步电机T型等值电路如图1所示。
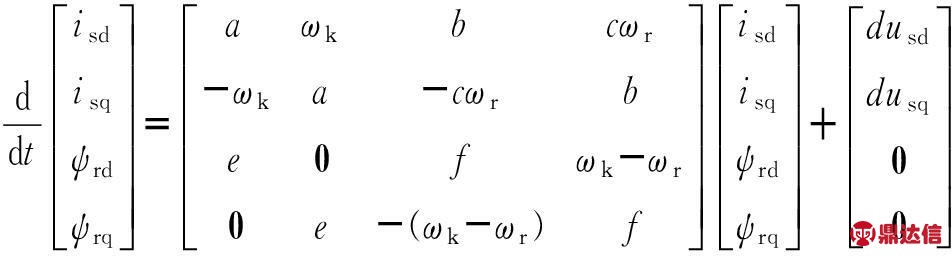
根据T型稳态等值电路,可以建立电机在以任意角速度ωk旋转坐标系中的状态方程如式(1)和式(2)所示。

图1 异步电机T型等值电路
Fig.1 T type equivalent circuit of induction motor
 。
。
(1)
输出方程为

(2)
式中:Rs为定子电阻;Rr为转子电阻;Ls为定子电感且有Ls=Lm+Lls;Lr为转子电感且有Lr=Lm+Llr;Lm为互感;Lls和Llr为定漏感和转子漏感,漏感系数为![]() ,转子时间常数为
,转子时间常数为![]() ;ωr为转子电角频率;ωe为同步角频率;同时有
;ωr为转子电角频率;ωe为同步角频率;同时有
![]() 。
。
令状态向量![]() ,则式(1)和式(2)可写成式(3)和式(4)形式。
,则式(1)和式(2)可写成式(3)和式(4)形式。

(3)
(4)
式中![]()
![]() ;
;
![]() 。
。
2 全阶磁链观测器设计与离散化分析
异步电机全阶磁链观测器是以电机本身作为参考模型,通过构建状态方程观测电机的磁链与定子电流,并将定子电流作为输出,引入实际电流与观测电流的误差作为反馈校正,通过调整校正项的反馈矩阵增益来提高观测器的性能[10-13]。
2.1 异步电机全阶磁链观测器设计理论基础
根据被控对象模型,可以构造一个动态方程与式(3)和式(4)相同的模拟系统为

(5)
其中,状态矩阵![]() 是将矩阵A中的电机转速和电机参数分别用估算值取代而得到。增加反馈矩阵,可构成全阶磁链观测器模型为
是将矩阵A中的电机转速和电机参数分别用估算值取代而得到。增加反馈矩阵,可构成全阶磁链观测器模型为

(6)
该观测器有两个输入即us和y,输出为![]() ,G为观测器输出反馈增益矩阵
,G为观测器输出反馈增益矩阵

(7)
式中:

![]() 。
。
2.2 静止坐标系下全阶磁链观测器设计及离散化分析
当ωk=0时,式(3)和式(4)为两相静止α-β坐标系下的状态方程,为区别其他模型,写成式(8)和式(9)形式。


(9)
式中:




![]() 。
。
由式(6)和式(8)可构成静止坐标系下全阶状态观测器模型为

(10)
常用的离散化方法有欧拉法、梯形法和双线性法,根据各种方法的计算复杂程度,工程上一般采用欧拉法实现,微分式表示为
![]() 。
。
(11)
把式(11)代入式(10),可得两相静止α-β坐标系下全阶磁链观测器的离散化输出为
![]()
![]()
g1Tisα(k-1)+g2Tisβ(k-1)。
(12)
![]()
![]()
g2Tisα(k-1)+g1Tisβ(k-1)。
(13)

![]() 。
。
(14)


![]() 。
。
(15)
2.3 同步旋转坐标系下全阶磁链观测器设计及离散化分析
当ωk=ωe时,式(3)和式(4)为同步旋转d-q坐标系下的状态方程,写成式(16)和式(17)形式。
![]() 。
。
(16)

(17)
式中:![]()



![]() 。
。
由式(16)和式(17)可构成两相旋转d-q坐标系下全阶磁链观测器模型为

(18)
采用欧拉法实现,把式(11)代入式(18),可得同步旋转d-q坐标系下全阶磁链观测器的离散化输出为![]()
![]()
g1Tisd(k-1)+g2Tisq(k-1)。
(19)![]()
![]()
g2Tisd(k-1)-g1Tisq(k-1)。
(20)
![]()
![]()
g3Tisd(k-1)-g4Tisq(k-1)。
(21)

g4Tisd(k-1)-g3Tisq(k-1)。
(22)
3 转速估算自适应律设计
由式(5)和式(6)可得
![]() 。
。
(23)
式中![]()
定义Lyapunov函数为
(24)
式中,λ是一个任意正常数。根据Lyapunov第二方法定理,如果V的导数负定,则e是渐近稳定的,且有![]() r-ωr渐近趋于零,估算转速逐渐逼近电机实际转速。由式(24)可得式(25)和式(26)。
r-ωr渐近趋于零,估算转速逐渐逼近电机实际转速。由式(24)可得式(25)和式(26)。


(25)

![]() 。
。
(26)
式中,eT((A+GC)+(A+GC)T)e在选定式(7)为反馈矩阵的前提下可以证明恒为负定。考虑到电机实际磁链不可检测,因而Δψr是不可知的,在实际应用中将含Δψr忽略。在满足dV/dt负定的前提下有![]() 。
。
(27)
求解式(27)可得[14]

(28)
当ωk=0时,根据式(28)可构建基于两相静止α-β坐标系下全阶磁链观测器的转速自适应辨识系统,利用PI调节器代替式(28)中的积分环节可得电机转速观测自适应律设计如式(29)。系统结构图如图2所示。
(29)
式中,![]() 。
。
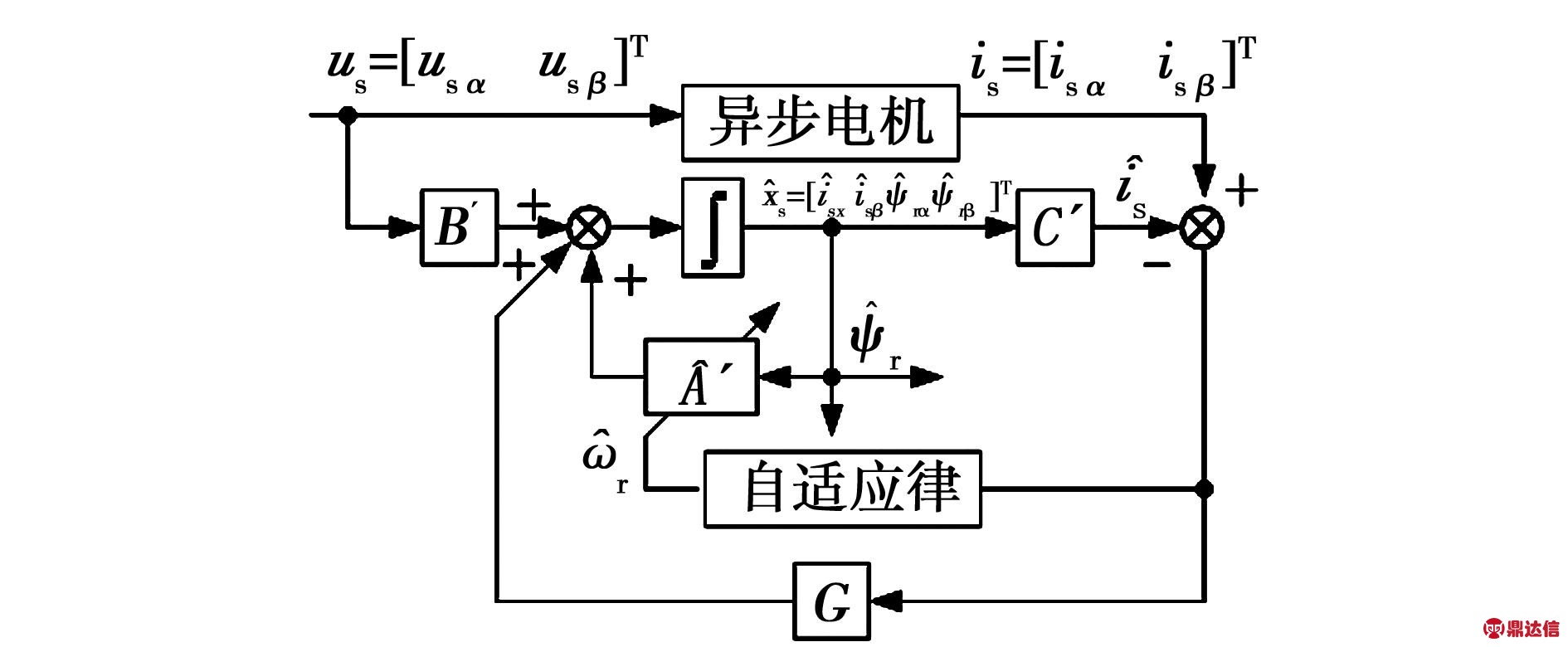
图2 静止坐标系下转速自适应辨识系统
Fig.2 Speed adaptive identification system based on static coordinate system
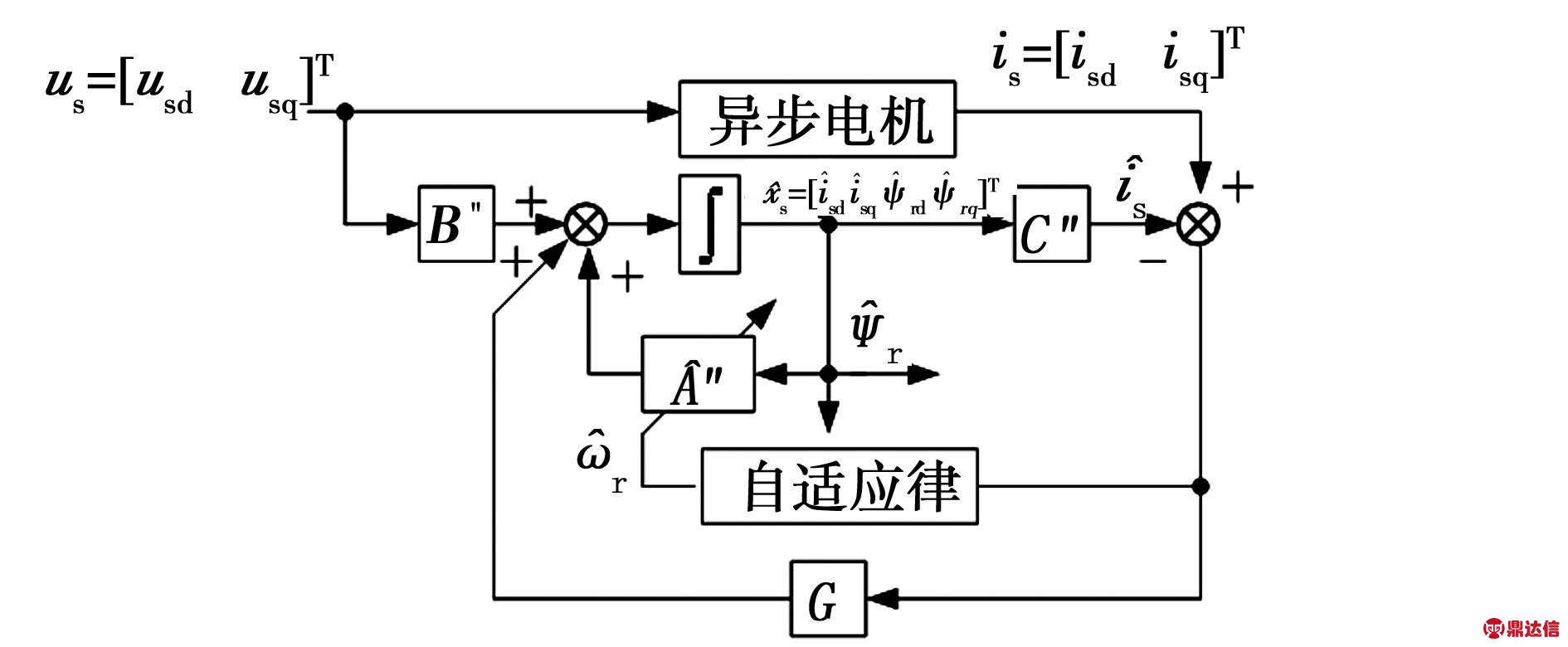
当ωk=ωe时,根据式(28)可构建基于同步旋转d-q坐标系下全阶磁链观测器的转速自适应辨识系统,利用PI调节器代替式(28)中的积分环节可得电机转速观测自适应律设计如式(30)。系统结构图如图3所示。

(30)
式中![]() 。
。
图3 同步旋转坐标系下转速自适应辨识系统
Fig.3 Speed adaptive identification system based on synchronous rotating coordinate system
式(29)和式(30)表明,电流估算的精度直接影响转速估算的精度,进而影响系统的控制性能。下面通过仿真分析基于两种坐标系下全阶磁链观测器转速自适应辨识系统电流和转速的估算精度[15]。
4 仿真分析与实验验证
4.1 仿真分析
为分析以上两种坐标系下全阶磁链观测器的控制性能,本文以Matlab仿真软件为平台,搭建了一个感应电机无速度传感器矢量控制系统仿真模型,利用S函数来实现基于两种坐标系下全阶磁链观测器的转速自适应辨识,进而对感应电机进行无速度传感器矢量控制。
仿真采用的异步电机参数如下:功率7.5 kW,电压380 V,频率0~120 Hz,转速0~3 600 r·min-1,极对数为2,定子电阻0.435 Ω,转子电阻0.816 Ω,互感69.31 mH,定子电感73.31 mH,转子电感71.31 mH。仿真结果如图4~图7所示。
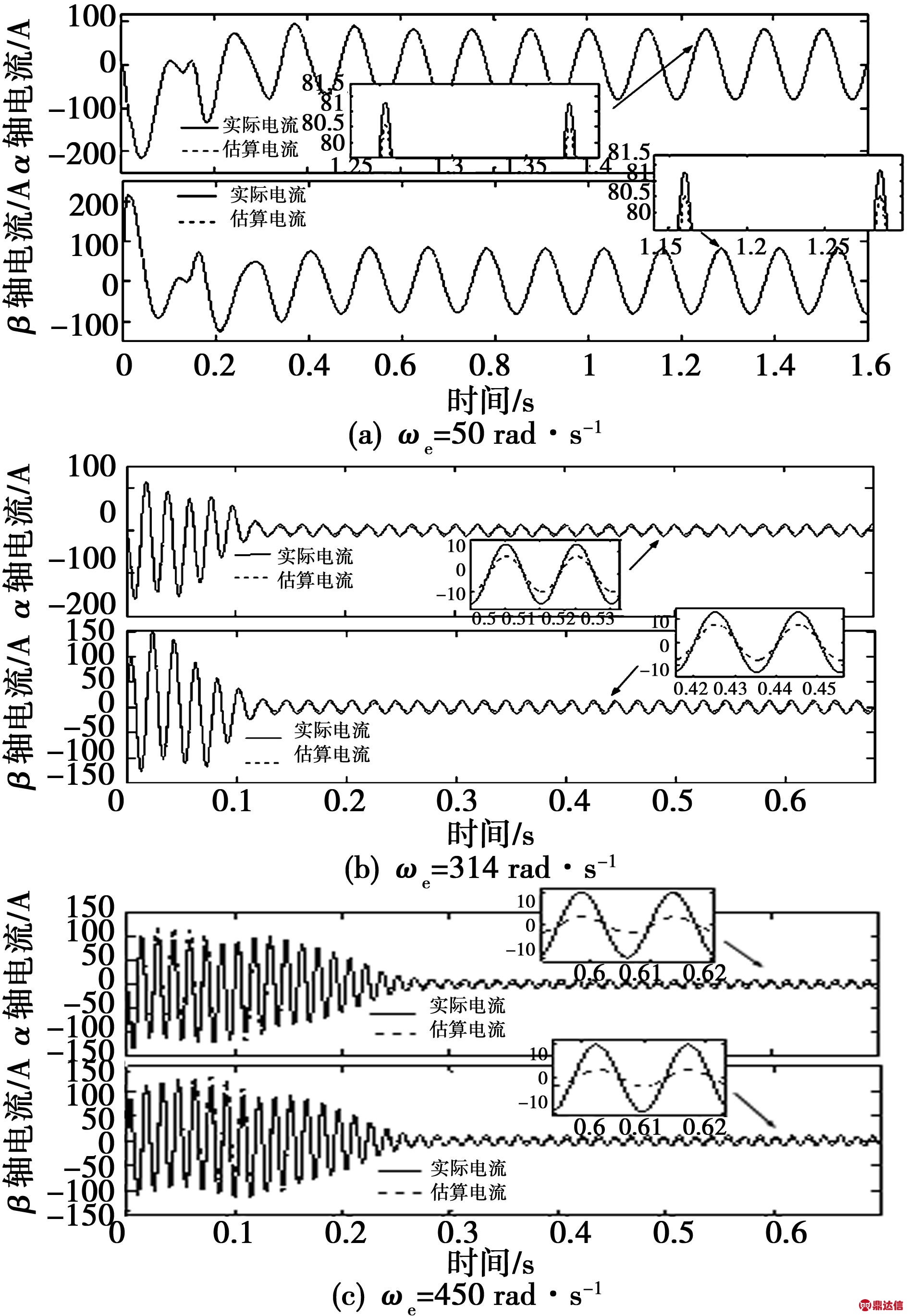
图4为静止坐标系下全阶磁链观测器的估算电流与实际电流仿真曲线,图4(a)、(b)和(c)分别为同步角频率ωe等于50 rad·s-1、314 rad·s-1和450 rad·s-1时的仿真结果,结果表明随着同步转速的增加,估算误差也跟随增加,在ωe等于450 rad·s-1时,估算电流与实际电流峰值误差达到了6.5A,这将会导致一定的转速估算误差。图5为同步旋转坐标系下全阶磁链观测器的估算电流与实际电流仿真曲线,图5(a)、(b)和(c)分别为同步角频率ωe等于50 rad·s-1、314 rad·s-1和450 rad·s-1时的仿真结果,结果表明在低速和高速状态下,d轴电流和q轴电流估算误差很小,几乎接近于零,这有助于进一步提高转速估算精度,特别是电机在高速状态下的控制精度和稳定性。
图6为静止坐标系下全阶磁链观测器的估算转速仿真曲线,图6(a)、(b)和(c)分别为电机实际转速等于200、1 500和2 500 r·min-1时的仿真结果,结果表明在低速状态下转速估算较为准确,但在高速状态下转速估算曲线发生较大震荡,估算误差较大。图7为同步旋转坐标系下全阶磁链观测器的估算转速仿真曲线,图7(a)、(b)和(c)分别为电机实际转速等于200、1 500和2 500 r·min-1时的仿真结果,结果表明在低速和高速状态下,转速估算误差均很小。
对比图4和图5,图6和图7,基于同步旋转坐标系下全阶磁链观测器转速自适应辨识系统电流和转速的估算精度高,特别是在高速状态下的转速估算精度和估算快速性均优于静止坐标系下的全阶磁链观测器。
图4 静止坐标系下观测器估算电流与实际电流曲线
Fig.4 Observer estimation current curve and the actual current curve based on static coordinate
system
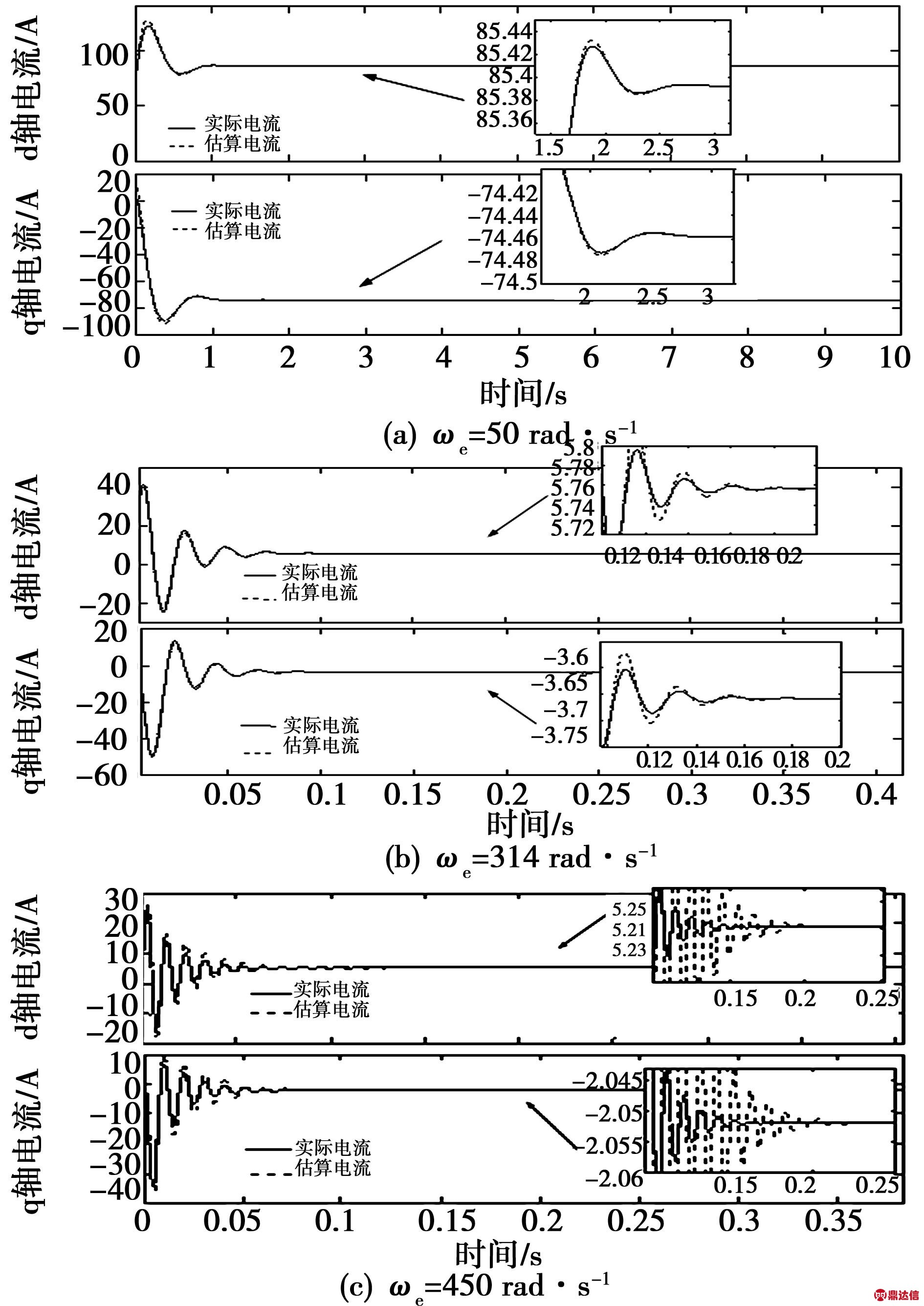
图5 同步旋转坐标系下观测器估算电流与实际电流曲线
Fig.5 Observer estimation current curve and the actual current curve based on the synchronous rotating coordinate system

图6 静止坐标系下转速自适应辨识系统估算曲线
Fig.6 Speed adaptive identification system estimation curve based on static coordinate system
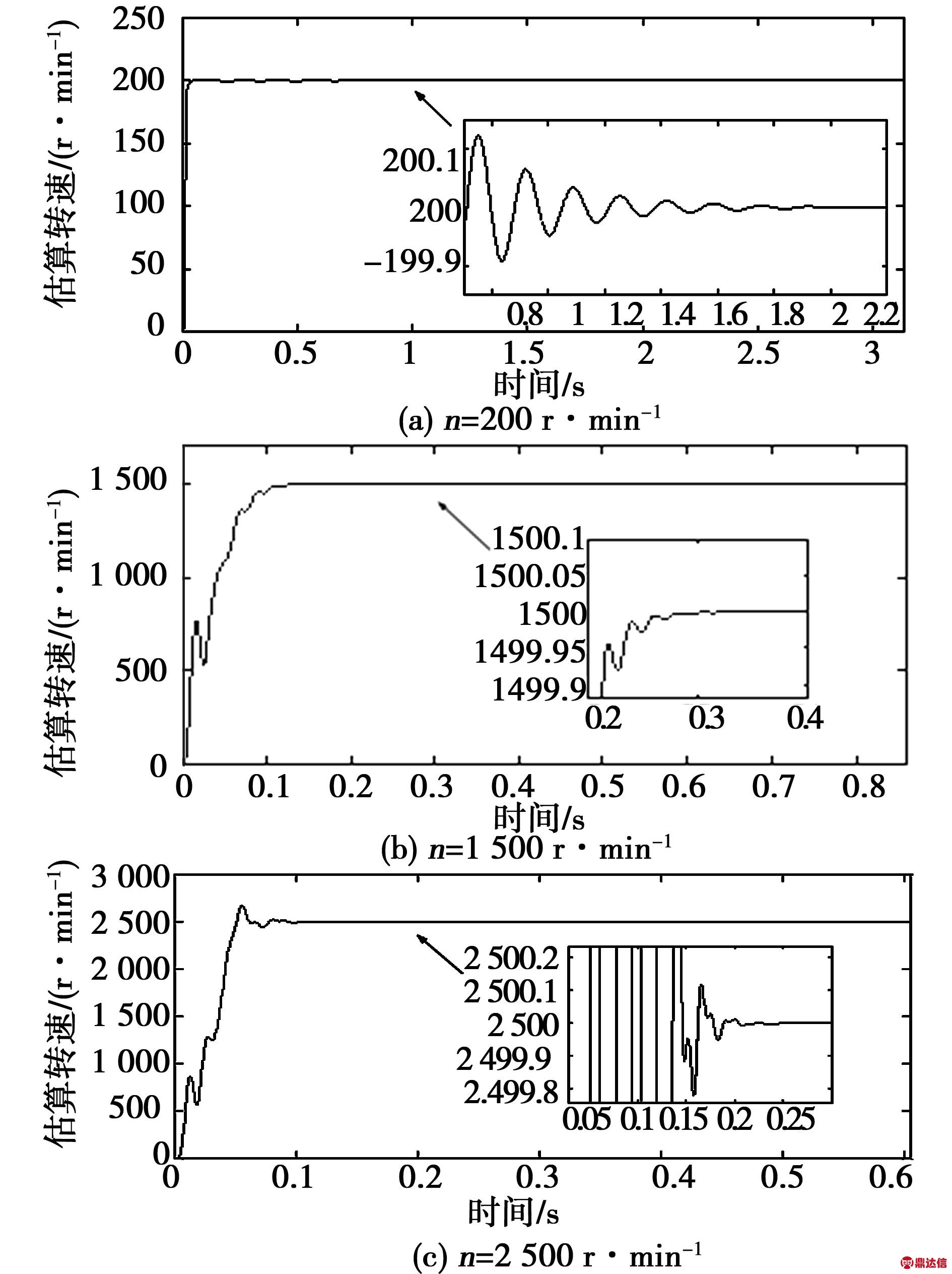
图7 同步旋转坐标系下转速自适应辨识系统估算
曲线
Fig.7 The speed adaptive identification system estimation curve based on the synchronous rotating coordinate system
4.2 实验验证
为验证两种坐标系下全阶磁链观测器及其构成的转速自适应系统的控制性能,在实验室搭建了逆变器实验平台,控制芯片为TMS320F28335,采用10 K开关频率,前文仿真采用的电机参数即为该实验电机的实际参数。分别采用基于两种坐标系下全阶磁链观测器转速自适应辨识系统构成对电机的无速度传感器矢量控制。实验结果如图8所示,图8(a)为两种方法的估算转速与实测转速记录结果,图8(b)为两种方法的估算转速和实际测量转速的绝对误差曲线对比。实验结果表明,采用基于同步旋转坐标系下全阶磁链观测器的无速度传感器矢量控制,其转速估算精度高,提高了系统控制的精确性,特别在电机高速状态下,转速估算精确且系统稳定。同时相比较梯形法、双线性法和龙格-库塔法等全阶磁链观测器的其他离散化算法,本文采用的欧拉法计算量明显减小,估算速度快,提高了系统的实用性和鲁棒性。
图8 无速度传感器矢量控制转速测量结果
Fig.8 Result of a measurement for motor rotation speed in the sensor-less vector control system
5 结 论
本文给出静止坐标系下和同步旋转坐标下两种全阶磁链观测器的设计方法,并采用了欧拉法进行了离散化分析,同时设计了两种坐标系下全阶磁链观测器的转速自适应辨识系统,仿真分析和实验结果表明,以同步旋转坐标系下的定子电流和转子磁链作为状态变量设计的全阶磁链观测器克服了离散化误差大,计算过程复杂的缺点,其构成的转速自适应辨识系统在电机低速和高速状态下,对电流和转速估算均很准确且快速,提高了感应电机无速度传感器驱动系统控制的精确性和实用性。


