
摘 要:建立了角向振动下气膜-密封环系统的动力学模型,应用微扰法和龙格-库塔法求解气膜角向刚度、临界转动惯量和角向摆动的二维振动方程,获得了密封系统失稳时的密封结构参数,分析了临界转动惯量与螺旋角之间的定量关系及失稳点振动的非线性动力学行为,并对模拟结果进行了试验验证.研究结果表明:在静态优化出的螺旋角范围(60°~80°)内,存在着失稳点域,特例中发现有16处,并且在变工况(不同的介质压力、转速)下,虽其振幅发生了变化,但其失稳点的螺旋角数值不变,这与试验结果相吻合.
关键词:干气密封;角向摆动;非线性;龙格-库塔法;混沌运动
干气密封内部气膜平衡间隙尺度为微米级(典型值为3~5 μm),显然间隙微小变化极有可能导致动静密封环间的干摩擦或泄漏量增大,因而保证气膜-密封环动态稳定性是干气密封可靠运行的关键[1].在进行干气密封振动响应分析时,可将3自由度(1个轴向,2个角向)的微扰运动简化为2个互相独立的微扰运动,一个只作轴向的微扰移动,另一个只沿2个正交轴作角向微扰摆动[2].在轴向微扰下,Miller等 、李双喜等 、杜兆年等 分别用步进法、摄动法、近似解析法求解了气膜动态特性参数,分析了其轴向稳定性.在角向微扰下,Etsion等[6-7]通过试验和理论计算获得了摆动自振频率约等于动环角速度之半;刘雨川等[8-9]按照小扰动线性化的分布参数法,联立气膜微扰雷诺方程和浮环运动方程,对角向摆动自振稳定性界限进行了数值分析;丁雪兴等[10]利用近似解析法求得了角向涡动气膜刚度的解析式.但以上均未讨论涡动失稳的内在因素,即与螺旋槽几何参数的关系.本文应用微扰法和龙格-库塔法求解了临界转动惯量与螺旋角之间的定量关系,进而求出了失稳时的螺旋角点域范围,利用实验结果验证了系统在试验条件下的稳定性,并分析了失稳时的系统非线性动力学行为.
1 密封系统振动方程的建立
干气密封结构主要由加载弹簧(波纹管)、O形圈、静环及动环组成(图1).当压力达到一定数值时,具有挠性支承的静环将从动环表面被推开,密封面之间保持一层极薄的气膜(厚度3~5 μm).
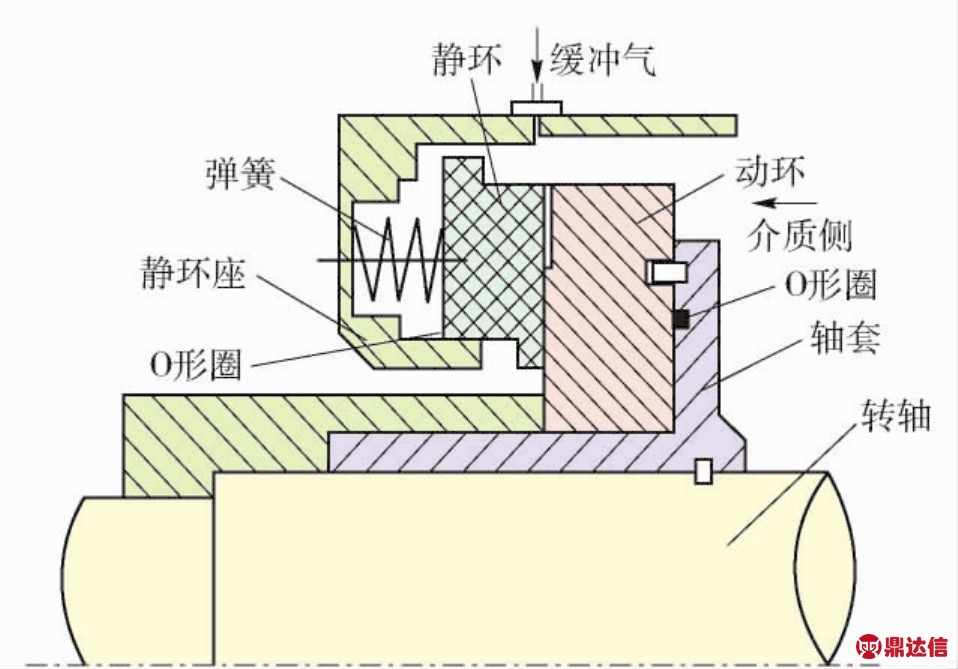
图1 干气密封系统结构分析
Fig.1 Structure analysis of the dry gas seal system
端面流体气膜密封不转浮环(静环)端面处,在单向任意干扰下绕其2正交轴(x,y)作角向摆动α*、β*,这种运动可由静环的摆动γ*与其绕转环轴的进动ψ*来描述,见图2.
对静环2个自由度角向扰动,运动方程为
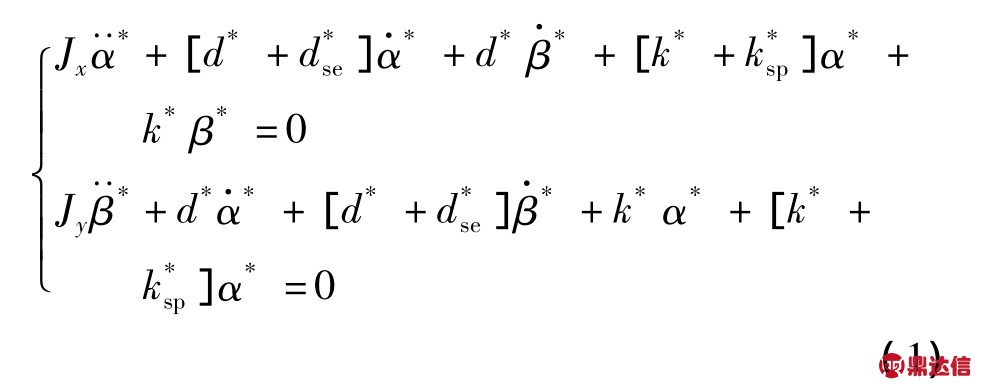
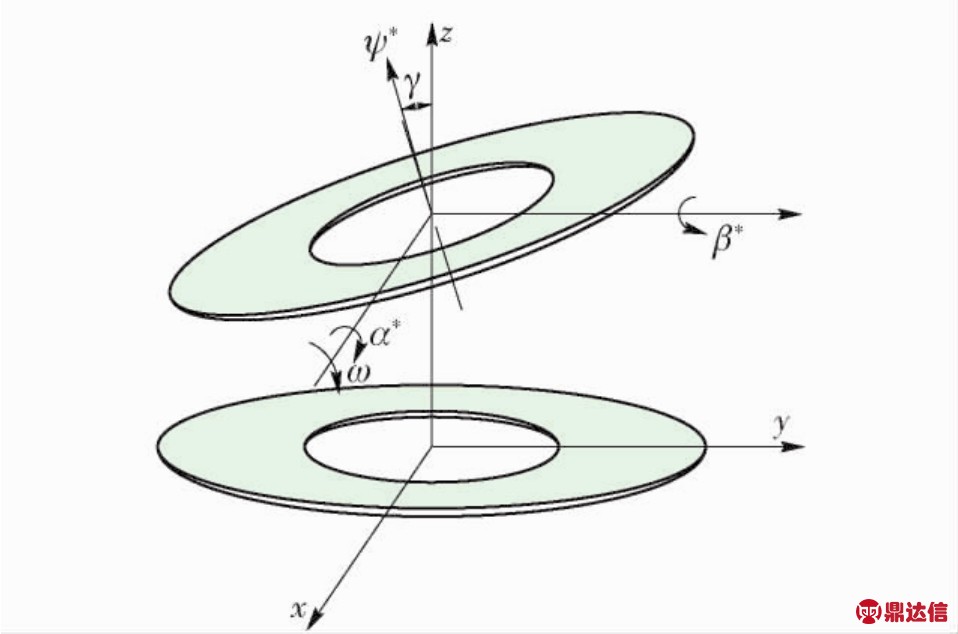
图2 静环角向摆动力学模型
Fig.2 Dynamical angular wobbly model of the static ring
式中:Jx、Jy为静环绕x、y轴的摆动惯量(因对称有Jx=Jy=J); 为支撑弹簧在角向的恢复力矩刚度;
为支撑弹簧在角向的恢复力矩刚度; 为次级密封在角向的恢复力矩阻尼;K*、d*为密封气膜在相应角向的恢复力矩刚度、恢复力矩阻尼;α*、β*分别为静环绕x、y轴摆动角度.
为次级密封在角向的恢复力矩阻尼;K*、d*为密封气膜在相应角向的恢复力矩刚度、恢复力矩阻尼;α*、β*分别为静环绕x、y轴摆动角度.
2 角向摆动失稳判据
角向摆动失稳条件[8]
式中静环摆动惯量
2.1 临界转动惯量Jcr的计算
气膜-密封环系统临界转动惯量Jcr表达式[8]为
由文献[9]得![]() ,考虑补偿环的追随性,工程上常取弹簧的刚度小于气膜的刚度,即
,考虑补偿环的追随性,工程上常取弹簧的刚度小于气膜的刚度,即![]() ,因而取中值
,因而取中值![]() ,则
,则
2.2 角向摆动刚度K*的计算
应用pH线性化方法及变分运算干气密封螺旋槽内瞬态微尺度流动场的非线性雷诺方程,得到气膜角向涡动刚度的解析式.继而利用复数转换和迭代法对稳态下气膜边值问题进行求解,求得气膜涡动刚度的近似解析解[10].
量纲为一的气膜角向刚度
式中:
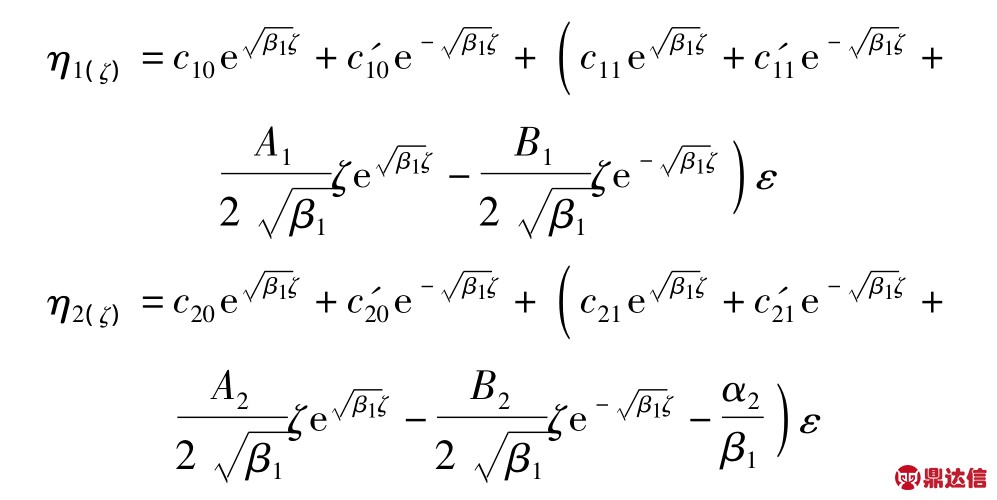
式中:ζ为量纲为一的极径;Ri为动环内径;δ为密封间隙;ζ0为外径和内径之比;η为槽深度变化的相对幅度![]() ,E 为 0.5 倍槽深;ω =nφ + β0ζ;β0=ntan β;n、β 分别为槽数和螺旋角;pi为环境压力(内压).
,E 为 0.5 倍槽深;ω =nφ + β0ζ;β0=ntan β;n、β 分别为槽数和螺旋角;pi为环境压力(内压).
气膜角向摆动刚度
3 失稳实例分析
选取文献[11]中的参数:实验气体为空气;内径 Ri=58.42 mm;外径 Ro=77.78 mm;介质压力po=4.585 2 MPa;环境压力 pi=101.3 kPa;螺旋槽数10;螺旋角75°;转速 nr=10 380 r/min;黏度μ=1.8 ×10-5Pa·s;槽深 2E=5 μm;密封间隙(气膜厚度)δ=3.05 μm.
3.1 动力学模型试验验证
利用Maple程序求解气膜刚度[12-13]式(6)、式(7)和振动方程式(1),获得了振动响应的相轨图(静环角向摆动速度α*'-静环角向位移α*)及时间历程图3(a)、3(b).从图中可知:摆动角度的振幅为2.29 ×10-4°,其摆动最大位移为 0.3 μm,很显然其值远小于密封间隙(气膜厚度)δ=3.05 μm,证明系统是稳定的.为了验证本文所建立力学模型的合理性,将上述参数在成都一通密封有限公司制作了样机,并在其高速试验台上进行试验,在运行2 h后目测密封端面无明显接触痕迹,摩擦副完好,其动环摩擦表面见图3(c).显然动静环没有发生碰磨现象,从而佐证了该动力学模型的合理性.
3.2 失稳点的判断
通过软件Maple对式(5)~(7)进行近似计算,获得了气膜-密封环系统临界转动惯量Jcr与槽深比η、螺旋角α的三维关系曲面图4.从图4中变化曲面可知α对Jcr的影响较敏感,α的微小变化可引起Jcr的较大变化.在静态优化出的螺旋角范围(60°~80°)内,存在着非连续的稳定区域.
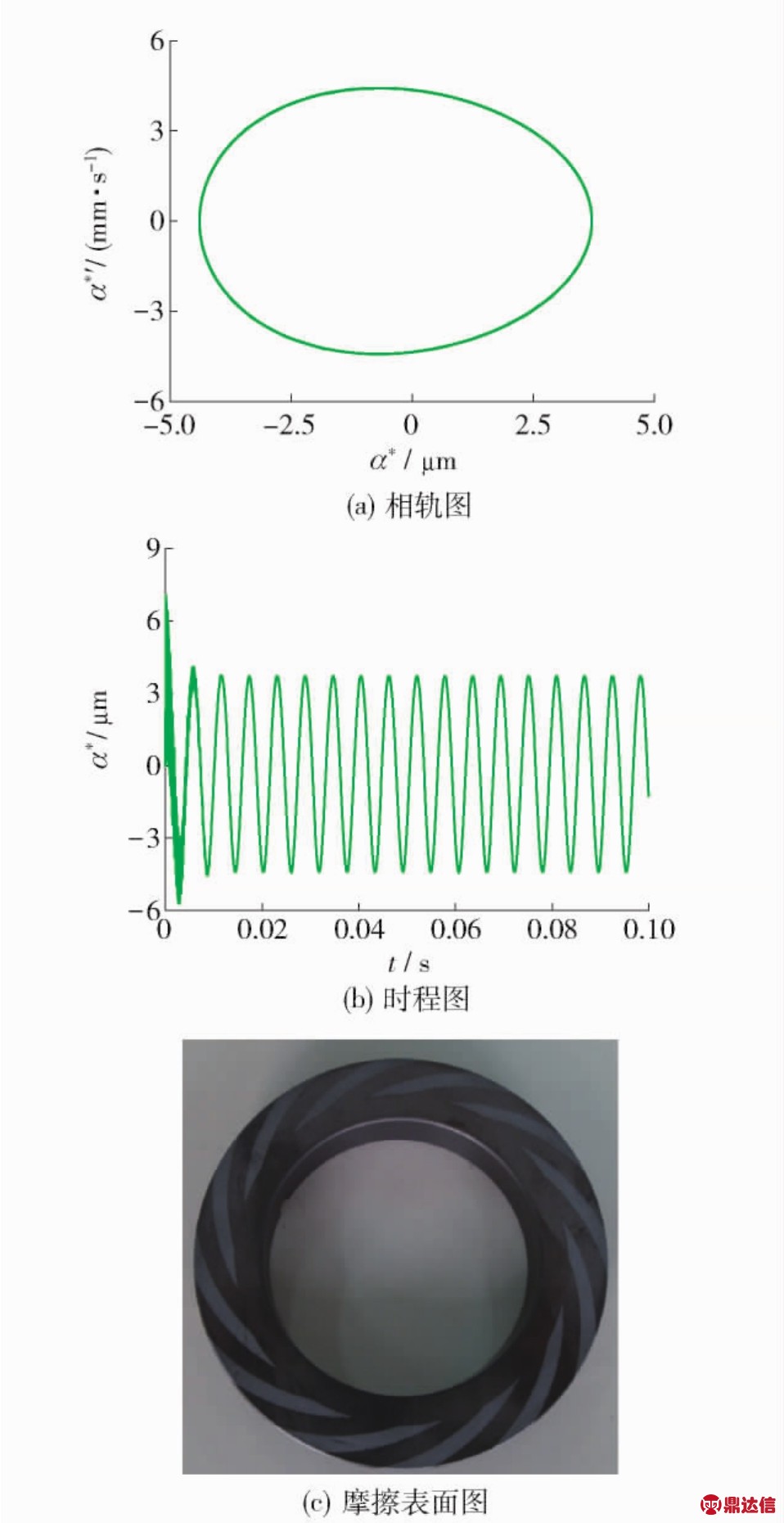
图3 实验参数振动图和动环摩擦表面图
Fig.3 Figuration of experiment parameters vibration and dynamical ring friction surface
为了更清楚地显示失稳点域,采用了二维坐标图Jcr-α来表示(见图5).通过静环的结构设计获得静环的质量,利用静环摆动惯量计算式(3)求得J=2.637 ×10-5kg·m2,由角向摆动失稳条件 J≥Jcr可知:因静环摆动惯量很小,失稳区域很窄,仅在Jcr=0处的点域.
从图5中可得出:螺旋角(60°~80°)存在16处失稳点域,如表1所示.
3.3 失稳点的振动分析

图4 系统临界转动惯量与α、η关系图
Fig.4 Relationship of critical moment of inertia and α,η
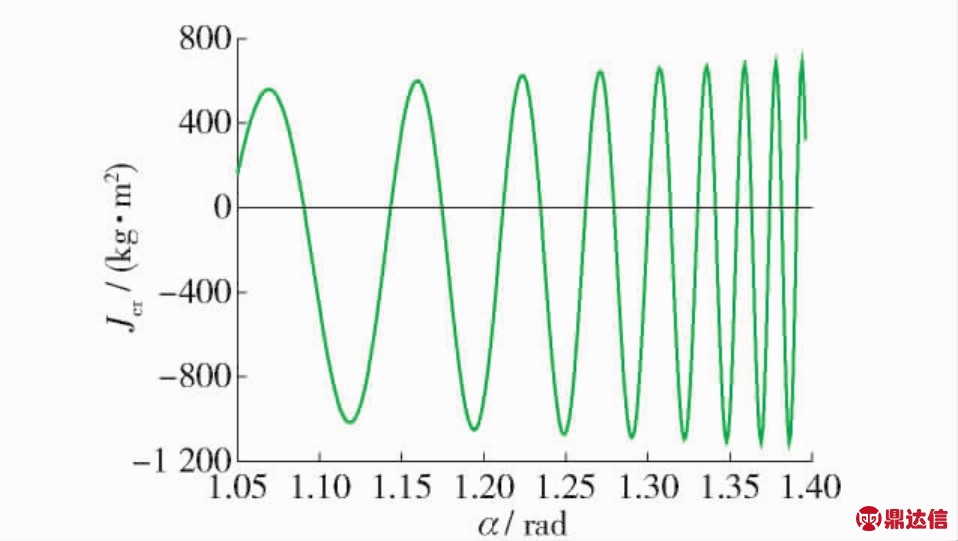
图5 Jcr与α的关系图(η=0.45)
Fig.5 Relationship of Jcrand α(η =0.45)
表1 螺旋角失稳点域范围
Table 1 Spiral angle instability point-fields range

在实验参数α=75°邻域内分析失稳点螺旋角α=75.26°的振动分析,利用龙格-库塔法求解角向摆动的二维振动方程(1),通过数值模拟,得到失稳点的相轨图、Poincare映射图、时间历程图,如图6所示.可以看出相轨图中存在混沌吸引子,说明了混沌运动的存在.改变螺旋角α=75.26°,其余参数不变,在成都一通密封有限公司制作样机,在其高速试验台上再次进行试验,在运行2 h后目测密封端面有明显接触痕迹,摩擦副已损坏,其动环摩擦表面见图6(d),显然动静环发生严重碰磨.
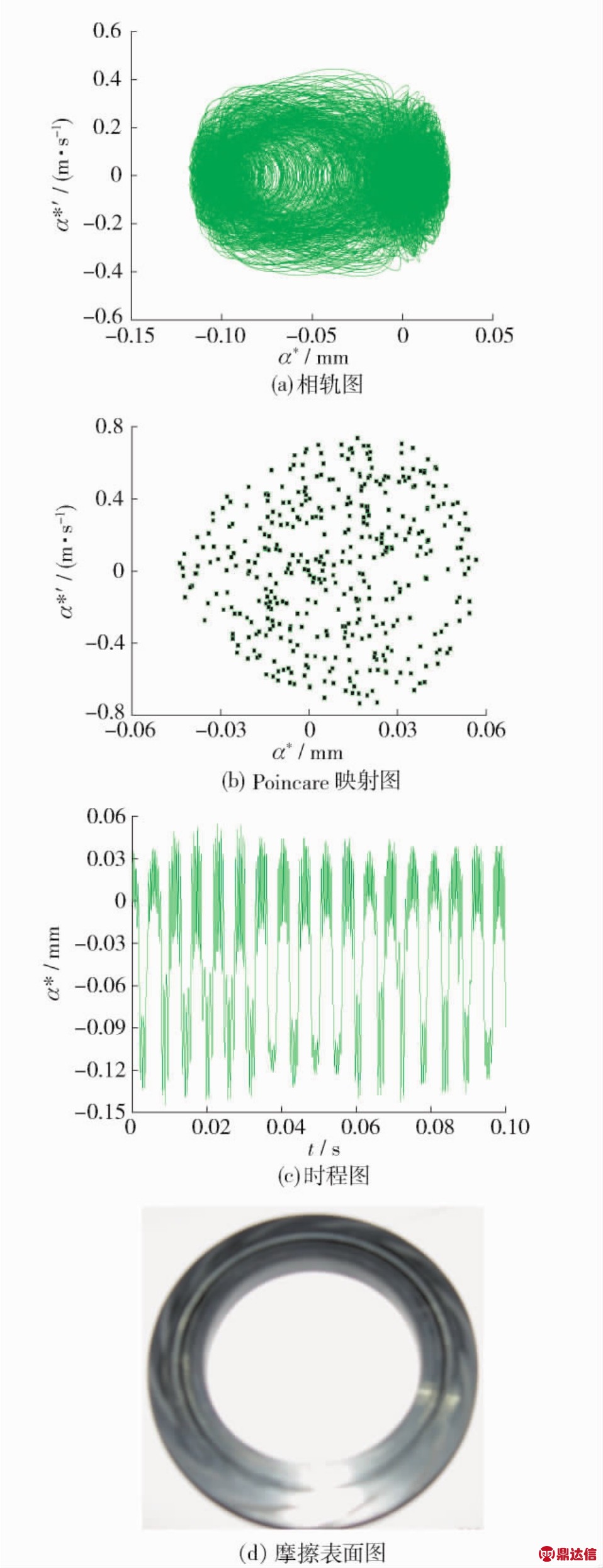
图6 螺旋角α9=75.26°失稳点的α*相轨图,Poincare映射图,时程图,动环摩擦表面图
Fig.6 Phase plane,Poincare maps and time history plot at spiral angle α9=75.26°and dynamical ring friction surface
3.4 变工况下的系统失稳分析
将上例的密封介质空气压力p0减少为2 MPa,工作转速nr下降为8 000 r/min,其他参数不变.通过软件Maple对式(5)~(7)进行近似计算,获得了气膜-密封环系统临界转动惯量Jcr与螺旋角α的二维关系,见图7.从图7中可得出:螺旋角(60°~80°)存在着与图5相同的16处失稳点域,说明改变工况但失稳点域不变,仅临界转动惯量Jcr的幅值发生了变化.
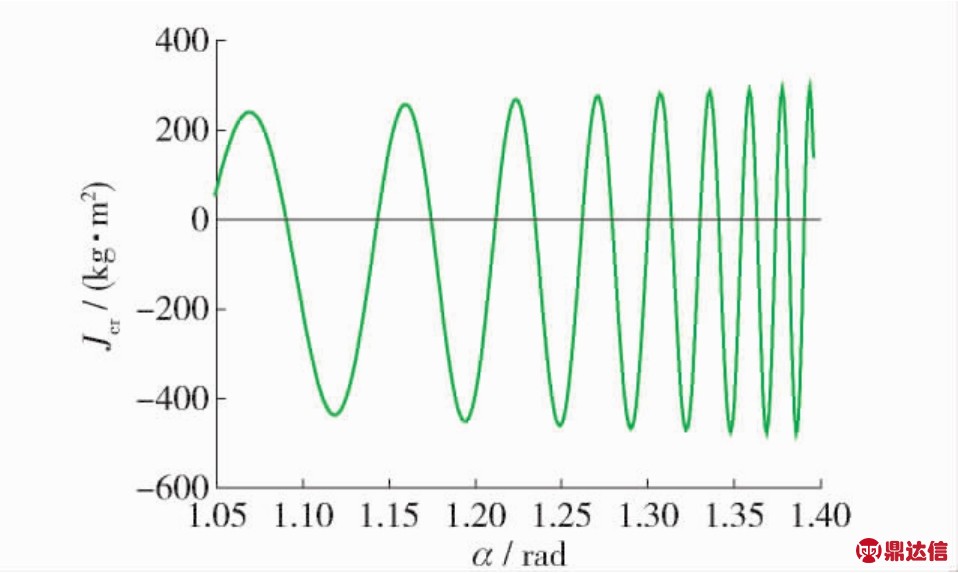
图7 变工况下Jcr与α的关系(η=0.45)
Fig.7 Relationship of Jcrand α under the various working conditions at η =0.45
4 结论
1)干气密封系统本身是一非线性系统,其动力学特性应具有非线性,通过特例的角向摆动分析,在螺旋角范围(通常为60°~80°)内,存在16处失稳点域,并且在失稳处获得了其非线性混沌行为.
2)改变工况,其失稳位置不改变,证明了半频摆动是一种固有特性[8-9].通过试验验证了本计算程序的正确性,且该程序为量纲为一式,具有普遍适用性,今后可通过该程序进行角向摆动分析获得螺旋角的稳定范围,为干气密封的优化设计提供理论指导.


