
摘要:针对目前车灯气密性检测时间长、工作效率低、操作复杂等问题,研究并制造了一种能自动检测的正压式气密性检测仪。在该系统中,引入了神经网络和模糊逻辑控制器。神经网络控制器判断车灯气密性是否合格,如果不合格,模糊控制器将进一步检测泄漏的位置。实践表明:该系统操作简单,敏感性高,稳定好,并具有很好的经济效益。
关键词:正压式;气密性检测仪;车灯;神经模糊控制
0 引言
车灯作为车辆的重要组成部分,在照明、行车信号、转向、安全行驶中起到保障的作用。但是由于车灯的设计、制造、装配以及材料等原因,不可避免地存在泄漏的现象,即气密性不足的问题。车灯的气密性不足会引起结雾、罩内压力变化、灯内积水、换气效果变坏等现象,这些都严重影响到车灯照明、寿命、外观,危及行车安全[1-2]。因此在汽车车灯生产线上,都采取一系列方法检测车灯的气密性。
常用的检测方法有负压测试、成分分析法[3]、光学检测法[4]、超声波检测法[5]、气压检测法。负压测试是采用抽真空的方式,之后保压一定时间,在规定的时间内,压力下降在规定的范围内,则为合格。由于负压测试有时会失真,因此检测准确率不高。成分分析法是将不同空气的检测气体充入车灯的内部,直至车灯内部的气压达到某一值的时候,用成分分析器检测车灯的表面,如果有泄漏缝隙,成分分析器就会显示出泄漏气体的分布单元,从而找出泄漏缝隙的具体位置。光学检测法是将某种气体混入车灯,根据光线投影相位的偏移或偏折角来检测车灯的缝隙。用超声波检测法检测时,可以直接使用超声波检测器,根据检测仪表指针是否摆动确定有无泄漏;然后,再寻找发出超声波的位置,以便确定泄漏点。气压检测法是将气体充入车灯里面,如果车灯存在缝隙,则车灯里面的气体会泄漏,而出现灯内气压下降。这种方法需要借助压阻式压力传感器进行车灯内部气压的检测,并且根据缝隙和泄漏的程度,判断是否报警。
上述这些检测方法可以从总体上衡量车灯的密封性能, 并且大致能指出泄漏缝隙的具体位置。但是这些方法局限性在于依靠人工操作,并且检测时间偏长,效率不高,操作复杂。为了适应自动化生产,作者设计制造了正压充气气密机,引入神经网络和模糊控制的方法检测车灯气密性,根据气压变化和检测时间,确定泄漏的位置。这为改进制造和装配工艺提供指导和依据,以降低废品率。
1 正压充气原理
该气密机主要是采用正压充气方式,利用压力控制器作比较的方式进行气密性检测。该系统由气泵产生0.6 MPa的气压,经过过滤减压阀和精密减压阀,使得气源压力降低为0.02 MPa,并充气到车灯中,使用压力传感器检测车灯内的压力。控制器依据压力的大小判断车灯是否泄漏。如果存在泄漏,根据压力的大小和检测时间判断泄漏的位置。正压充气原理如图1所示。
![]()
图1 正压充气原理
2 控制器设计
该气密机的控制器主要由神经网络和模糊逻辑构成。由于在气泵的供气过程中,会产生压力的误差,如果单一地设定压力传感器的阈值,会使得最终的检测结果产生误差,而引入神经网络控制算法,使得检测更具柔性。对于存在泄漏的车灯,确定泄漏的位置,对改进设备、工艺有着积极的意义,因此采用模糊推理的算法确定。
2.1 神经网络控制器
神经网络是一个由大量简单的处理单元神经元广泛连接组成的人工网络,是以工程技术手段模拟人类大脑的神经网络结构与功能特征的一种技术系统,它用大量的非线性并行处理器来模拟众多的人脑神经元,用处理器间错综灵活的连接关系来模拟人脑神经元间的突触行为,它能从已知数据中自动地归纳规则,获得这些数据的内在规律,具有很强的非线性映射能力。神经网络具有很好的非线性、容错性、自学习和对环境的自适应能力,在信号处理、模式识别、智能控制、智能诊断等领域中广泛应用[6-8]。
建立一个神经网络模型,主要确定3个方面的问题:(1)每层的神经元数目;(2)初始权值的选取;(3)期望的误差和学习率的选取。
输入层起缓冲存储器的作用,把数据加到神经网络上。从气密机的原理可知,需要确定气泵的气压、过滤减压阀的气压、精密减压阀的气压、已经充气到灯具的气压,因此可知神经网络的输入层节点数为4。
输出层节点,希望能够直接从输出结果得到故障模式的判断。对于气密机的结果,神经网络需要判断合格与不合格2种,因此确定神经网络的输出层节点数为2,用二进制编码方式,可以表示为(0,0,0,0)、(0,0,1,0)。
隐层起抽象的作用,它能从输入提取特征。增加隐层可增加人工神经网络的处理能力,但是必将使训练复杂化、训练样本数目增加和训练时间增加。而误差精度的提高实际上也可以通过增加隐层的神经元数目来获得,其训练效果也比增加层数更容易观察和调整。所以一般情况下,应优先考虑增加隐层中的神经元数。文中选取隐层数为4。
隐层节点数的选择对整个神经网络的性能有重要的影响。目前对隐层节点数的选取尚无统一标准,一般是根据经验或通过训练学习后,考虑网络的学习次数和识别率综合比较后选定。文中取8。
根据设计,气泵的气压为0.6 MPa,过滤减压阀的气压为0.2 MPa,精密减压阀的气压为0.05 MPa,充气到灯具的气压为0.02 MPa。各气压的压差分别为±0.5、±0.05、±0.005、±0.005 MPa。经过训练之后,对传感器检测的8组数据进行判定,如表1所示。气密机的状态编码如表2所示。
表1 等待判断的数据
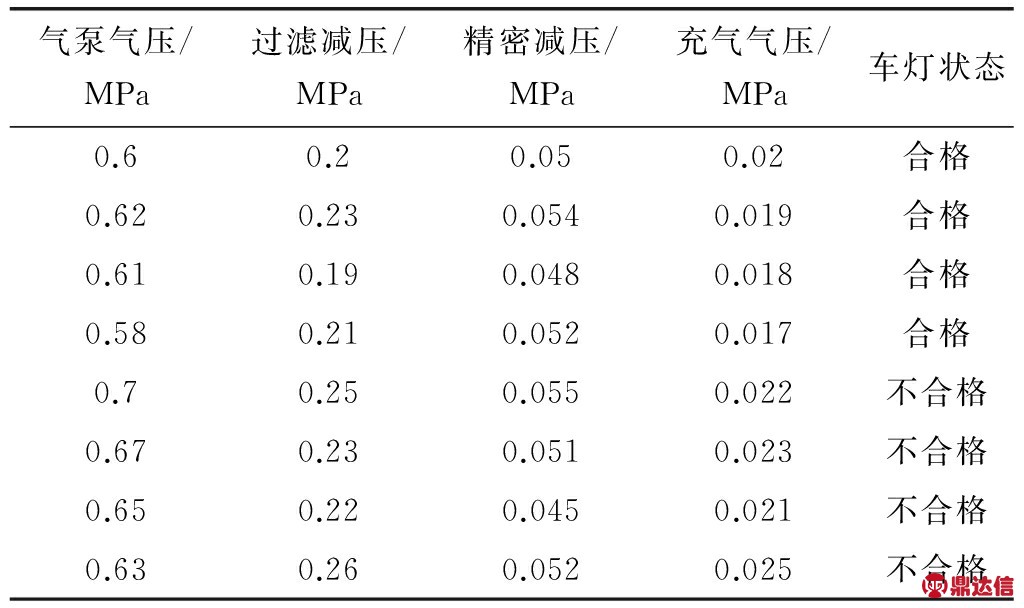
表2 气密机状态编码
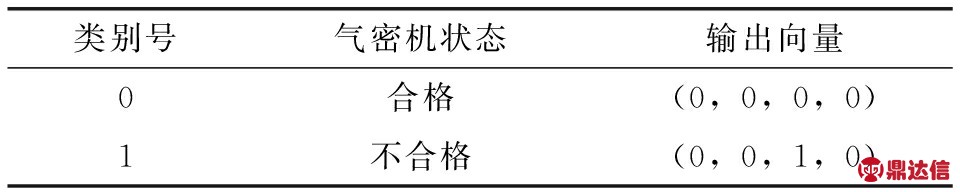

图2 网络训练过程中的误差变化曲线
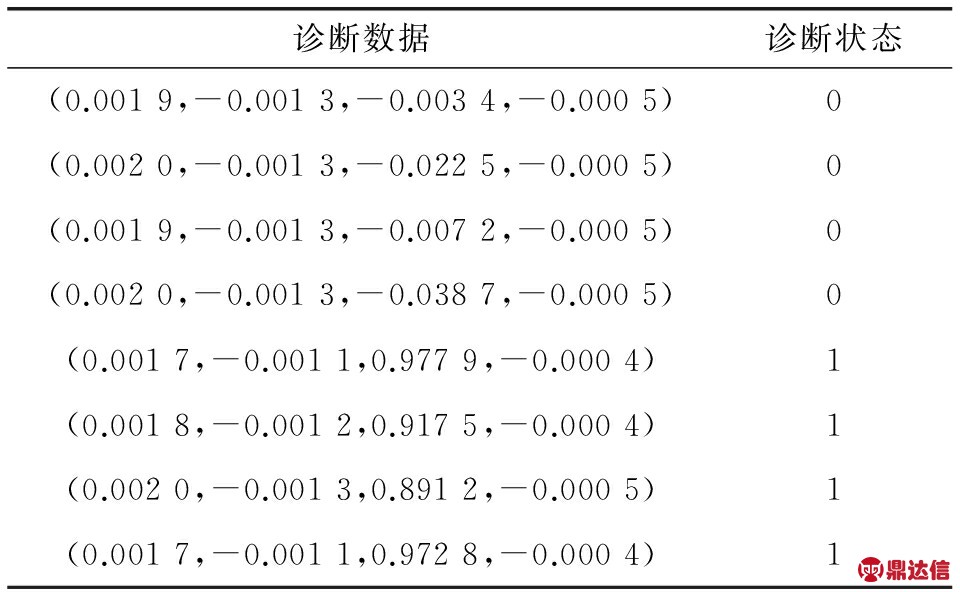
经过21次迭代训练后(如图2所示),判定结果如表3所示。可以看到:经过训练之后,神经网络对各个样本的诊断结果均正确。
表3 诊断结果
2.2 模糊控制器
模糊控制器是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的一种计算机数字控制技术。它有3个主要特点:(1)用语言变量代替数学变量或两者结合;(2)应用模糊条件语句来刻画变量间的函数关系;(3)用模糊算法来刻画复杂关系。其研究对象具备以下一些智能控制对象的特点:模型不确定性,非线性,复杂的任务要求[9-10]。
一个完整的模糊控制器主要由模糊化、模糊推理、数据库、规则库和清晰化等五部分构成,如图3所示。
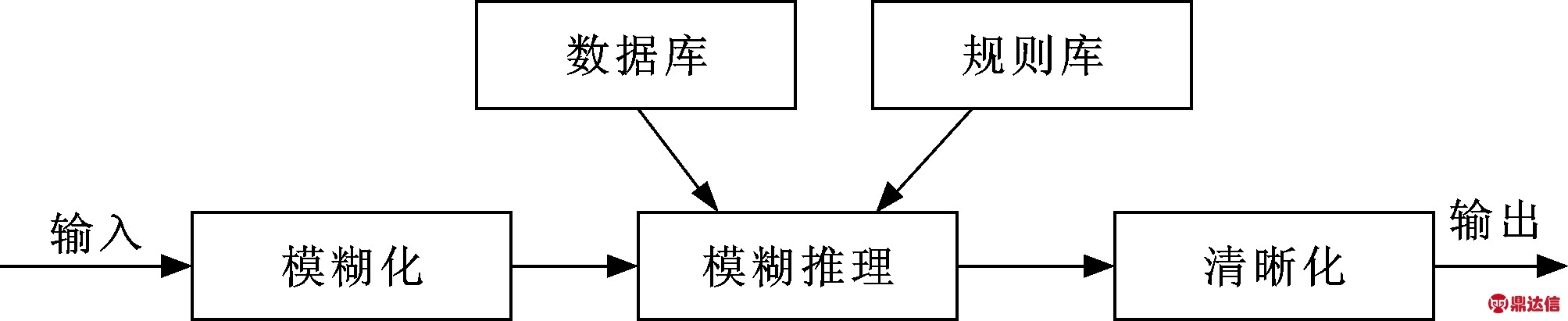
图3 模糊逻辑控制器
在气密机的泄漏位置判断系统中,输入量为压力差p和时间变化率t。压差的基本论域为p=[-0.005,0.005]; 语言变量的论域为pc=[-1,1];时间变化率的基本论域为t=[-2,2]; 语言变量的论域为tc=[-1,1]; 输出的基本论域为pos=[-3, 3];输入的模糊子集为S(小)、M(中)、L(大);输出pos选定5个模糊子集:VN(很近)、N(近)、MN(中等)、F(远)、VF(很远)。隶属函数的模糊子集如图4所示,这是一个双输入-单输出的模糊控制器。
模糊逻辑推理表。语言规则模块是模糊控制器的核心部分, 它是一个规则库。运用模糊数学理论进行推理计算,以得到一个模糊输出量。模糊补偿策略的核心是模糊规则的确定,模糊规则实质上是将操作员的控制经验加以总结从而获得的一条条模糊条件语句的集合。
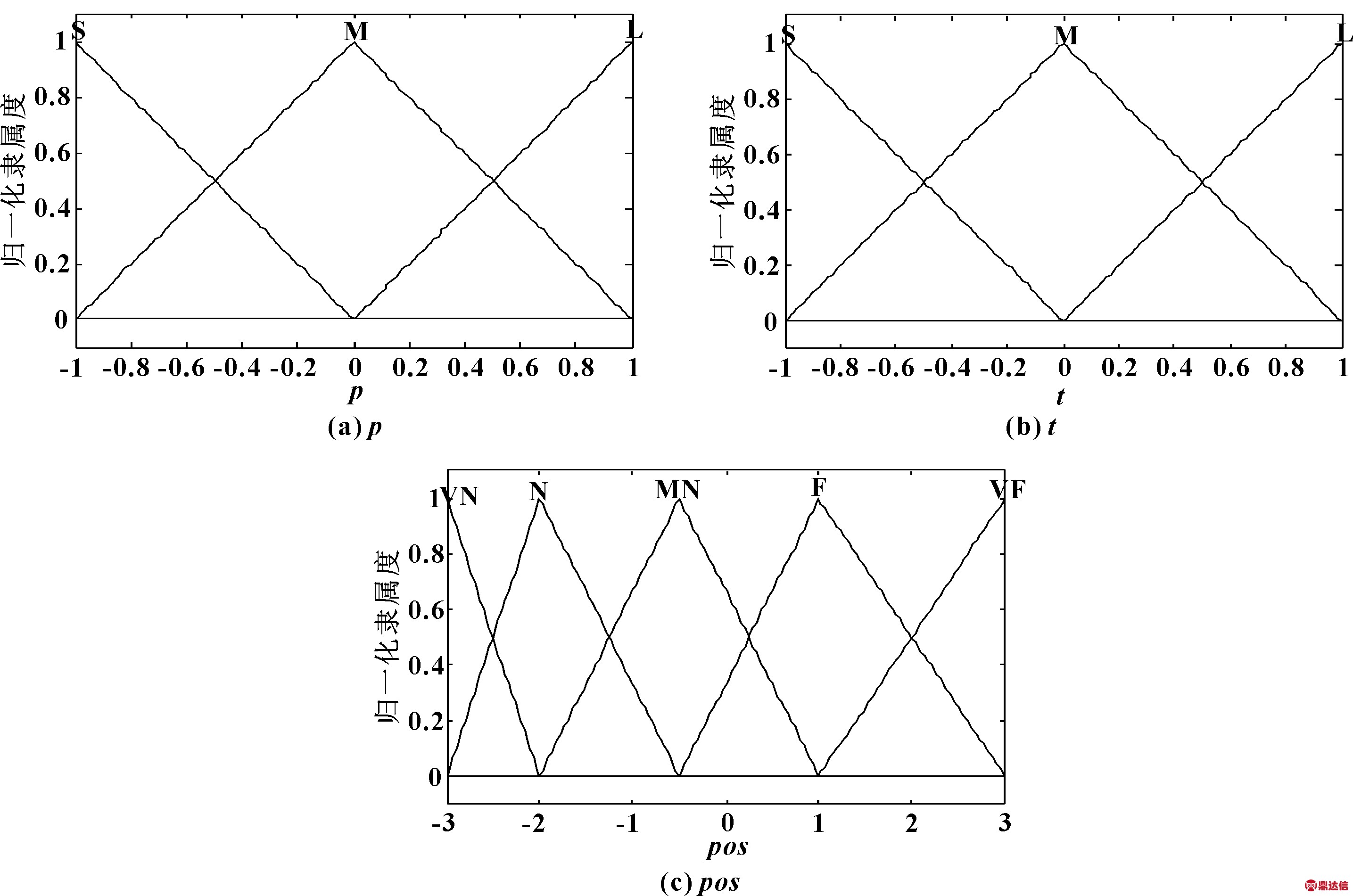
图4 隶属函数p、t、pos的模糊子集分布
模糊控制规则用条件语句表示如下:
If p=A and t=B, then pos=C
其中:A、B、C分别是输入和输出;p、t、pos分别是论域上的模糊子集。
根据大量的试验及经验,车灯的气密性与气压变化及时间有直接的关系,由此得到模糊推理规则如表4所示,输出变量pos的模糊规则观测窗如图5所示。
表4 模糊控制规则表
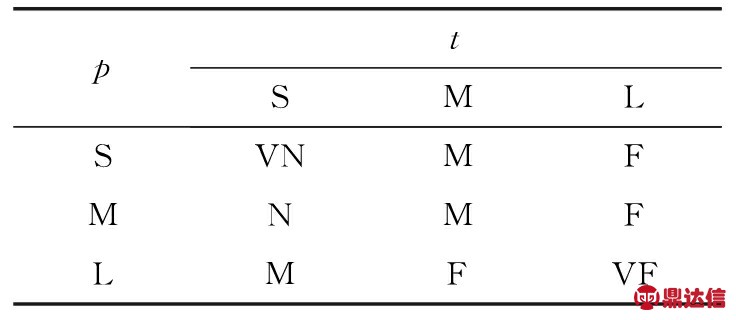
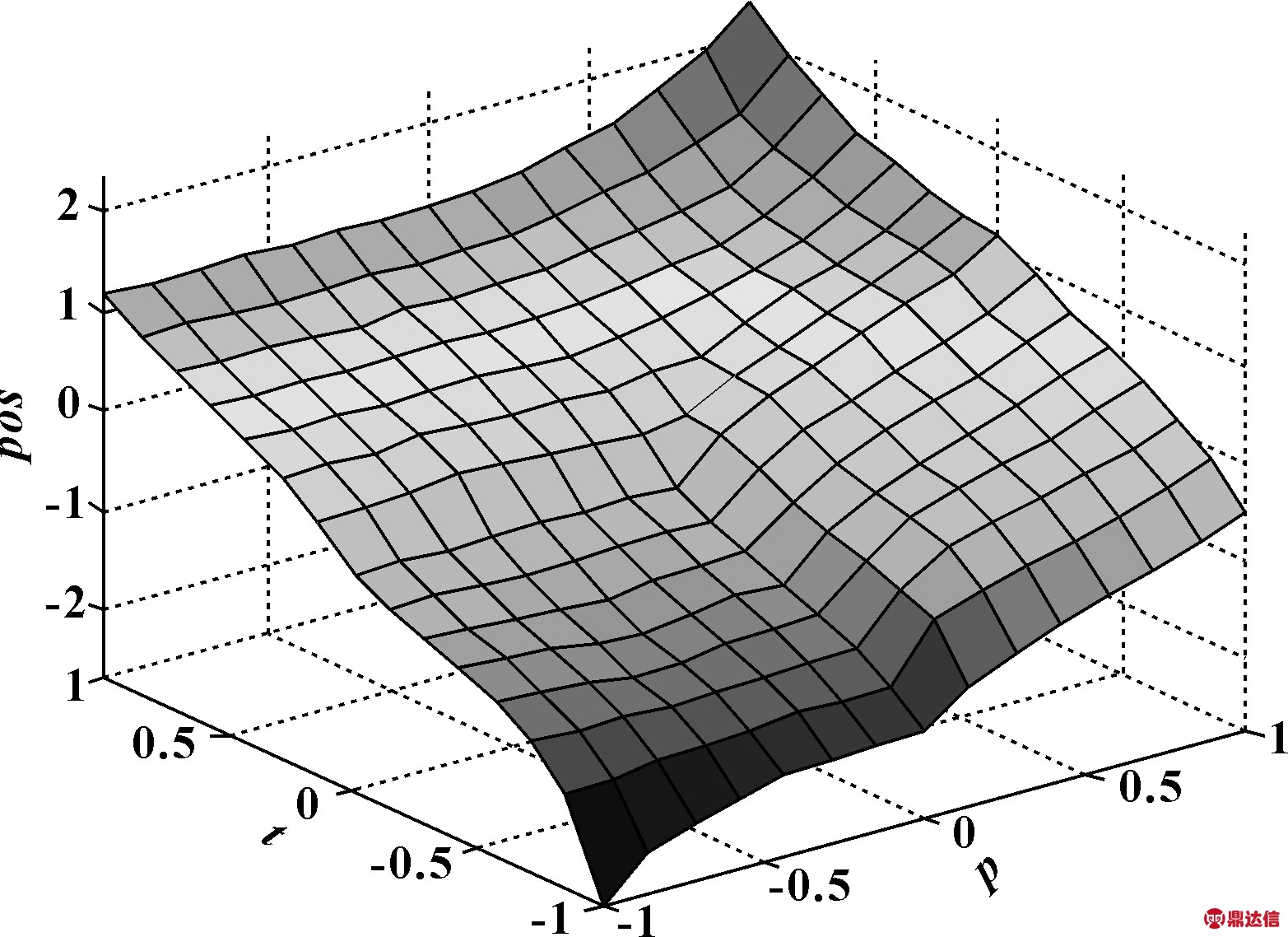
图5 输出变量pos的模糊规则观测窗
2.3 气密机控制器的硬件实现
带神经模糊控制器的气密机的硬件主要由STM32单片机、4个压力传感器、1个计时器、1个神经网络控制器模块、1个模糊逻辑控制器模块、1个精密压力开关和1个显示仪组成,如图6所示。压力传感器的信号经过A/D转换后传送到单片机STM32,与神经网络模块相接。经过识别后,判断合格,压力开关绿灯亮,直接在显示仪上显示。如果压力开关为红色,表示不合格,则再经过模糊控制模块判断车灯泄漏的位置,并显示出来。
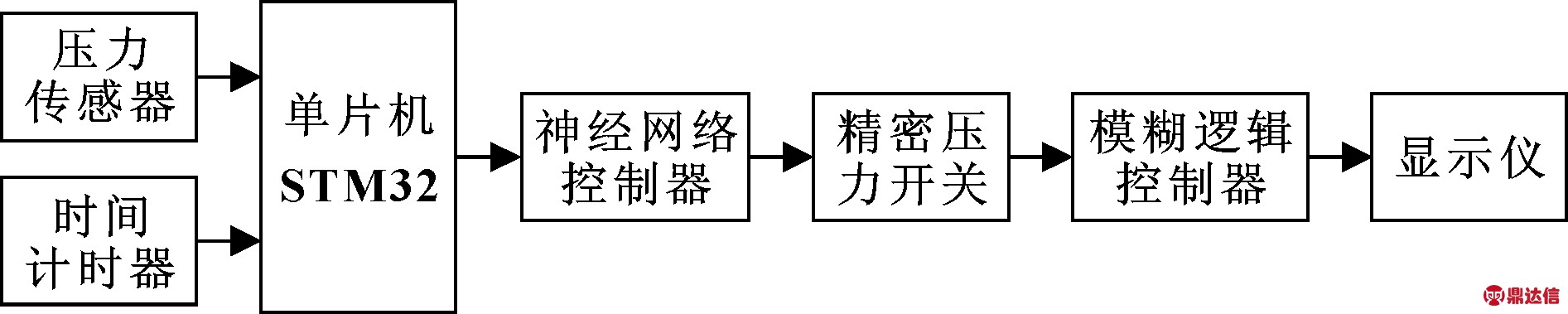
图6 气密机检测仪控制硬件
3 气密机的硬件组成
(1)箱体
机体正表面有:输入电源开关按钮,测试电源按钮,测试方式选择按钮,蜂鸣器,不合格显示灯,合格显示灯,精密压力表,数显时间继电器。侧面有:压力表,压力调节开关。如图7所示。
(2)气路设计
该气路由空气过滤器、减压阀、油雾器、过滤减压阀、精密减压阀、电磁阀和压力开关组成。气源的气压为0.6 MPa,
经过减压阀后降低为0.2 MPa,再经过过滤减压阀之后将为0.05 MPa,经过精密减压后得到0.02 MPa的干净气体,并充气到车灯内。该气路如图8所示。
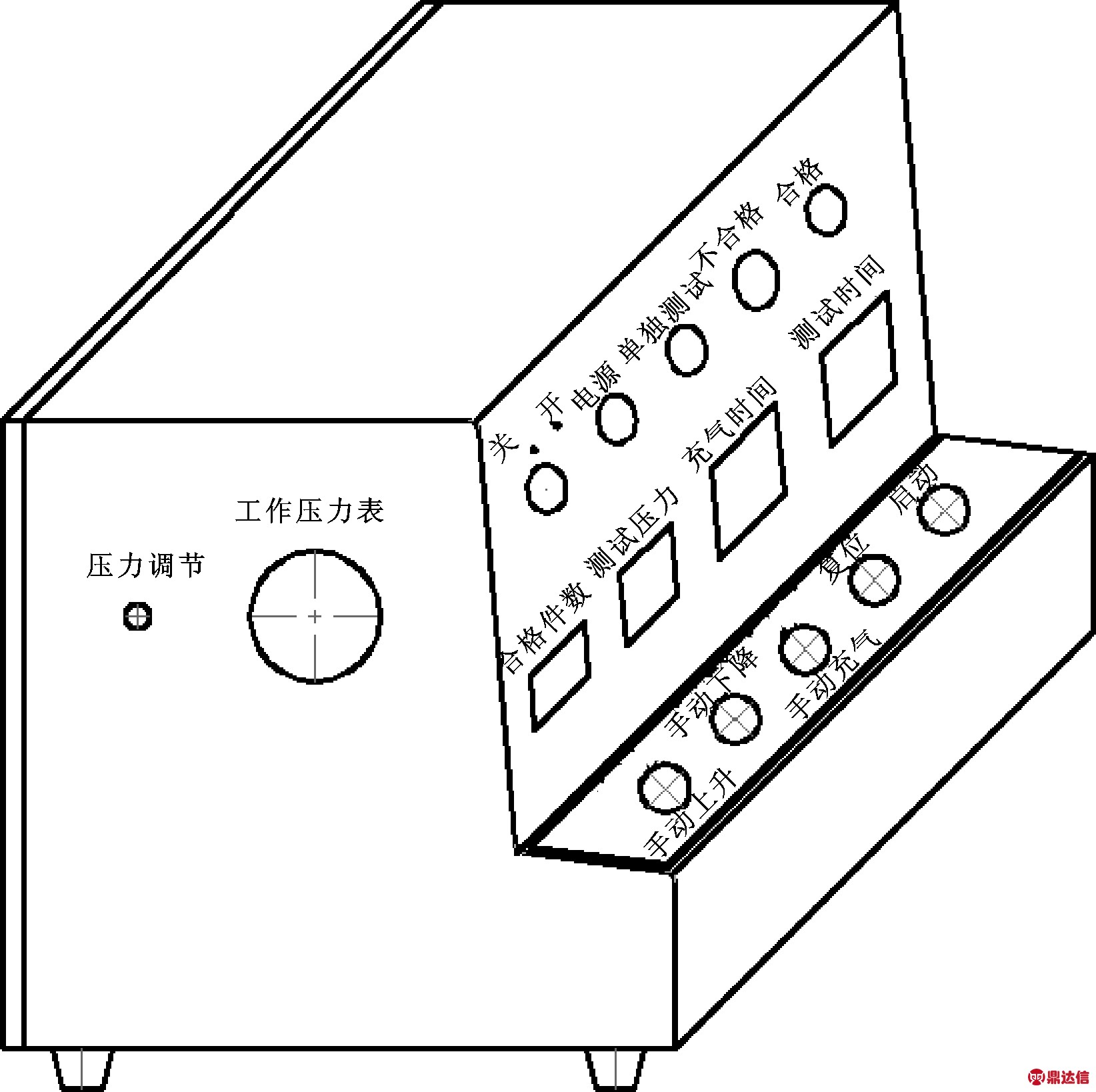
图7 气密机检测仪外壳箱体
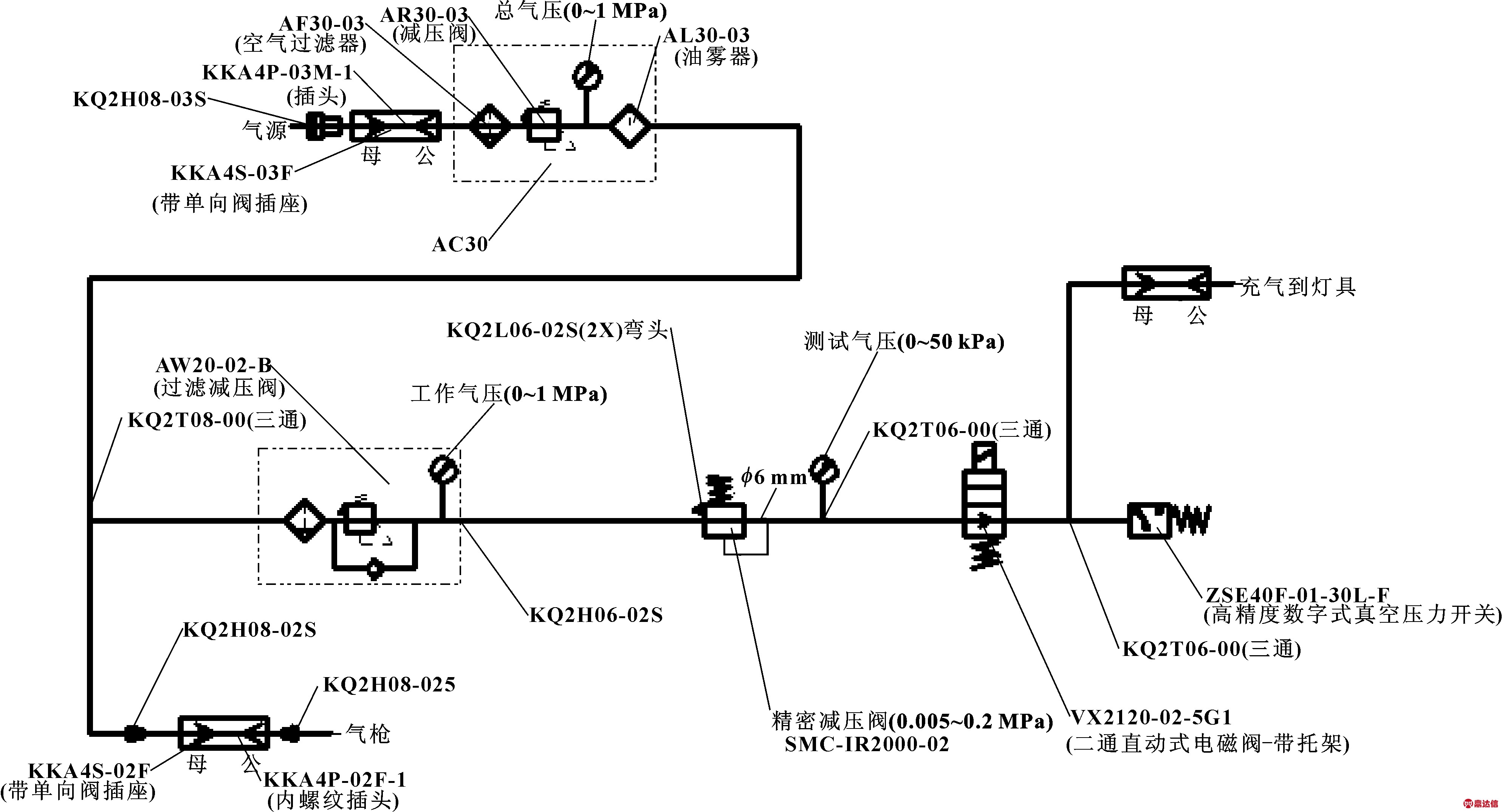
图8 气密机检测仪气路原理

图9 正压式气密机检测仪
把以上零部件组装之后得到正压箱式气密机,如图9所示。
4 正压箱式气密机的应用
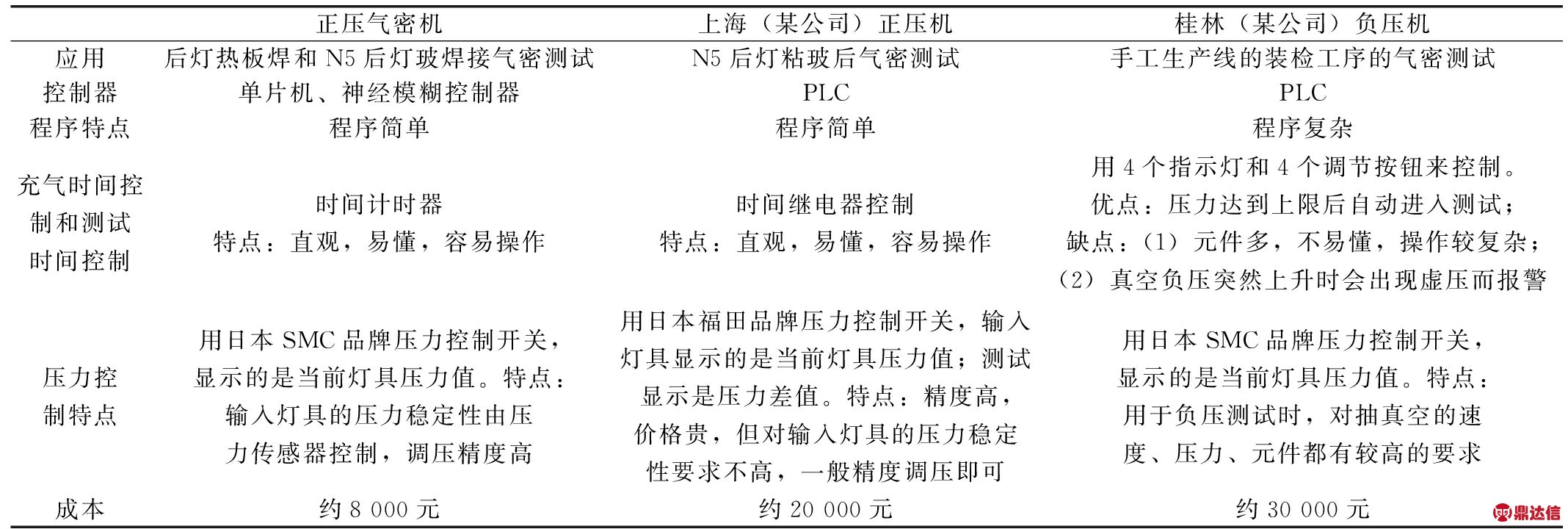
通过表5中的对比可知,箱式气密机有以下优点:
(1)体积小,质量轻,成本低,检验时间短,有着良好的经济效益;
(2)减轻工人劳动强度,改善工人工作环境,提高生产效率,保障工件质量,优化工艺;
(3)操作简单,智能判断车灯的气密性,使得检测实现自动化。
表5 正压气密机的使用及经济效益对比
5 结束语
车灯的气密性影响着车灯的质量,在总结现有检测气密性的原理基础上,设计和制造了正压箱式气密机,应用神经网络和模糊逻辑控制器,判断车灯的气密性以及存在泄漏的位置。试验结果表明:该气密机具有较高的灵敏性和稳定性,操作简单,安全可靠,并具有很好的精机效益。除此之外,正压式气密机实现了检测自动化,降低了管理工作量和难度,提高了生产效率。


