
摘 要:为揭示锥环式牵引传动装置能够进行自助力变速的机理,分析了锥环式牵引传动稳态工况与变速工况内、外接触区油膜卷吸速度与自旋速度方程,构建了接触区弹流润滑模型,推导了沿变速方向的牵引力表达式,并研究了接触区油膜沿变速方向牵引力的影响因素及其作用规律. 研究表明:变速时,由于变速角θ的存在,使得接触区油膜存在沿锥轮母线方向的侧向速度,从而在接触区产生沿变速方向的牵引力,在此力的作用下,锥环将沿变速方向运动,实现自助力变速;且变速角θ越大、滑滚比s越小,输入锥轮转速越高以及接触载荷越大,沿变速方向的牵引力也越大,变速越省力.
关键词:牵引传动;牵引力;弹流润滑;自旋运动
车辆无级变速器是车辆理想的传动形式[1],牵引传动作为无级变速的一种形式,具有结构简单、成本低、传动平稳及效率高等诸多优点,在车辆领域具有广泛的应用前景.
目前,在车辆中应用较广的牵引传动结构为多点接触环盘式结构[2-3],如图1所示. 针对环盘式结构,国内外学者做了大量的研究工作:Madhusudan和Zhang等[4-5]对全环盘式牵引传动进行详细的运动学分析,得到了各结构件之间的几何关系以及系统的传动比,并给出了牵引力计算的经验公式;Sanda[6]将环盘式牵引传动接触区简化为3个区域:弹性区、黏性区以及塑性区,对3个区域分别采用简化的流变模型计算切应力,计算得到的最大牵引系数与试验值的差距在10%左右;George[7]建立了环盘式牵引传动稳态工况下寿命、牵引力以及效率模型,并分析了接触载荷、滑滚比、椭圆率、表面粗糙度以及油液温度等对其寿命、牵引力以及效率的影响规律;Yukihito等[8]建立了考虑材料属性及滚动体表面牵引力的寿命仿真模型,并指出当牵引系数增大时,牵引传动扭矩容量增大,但寿命降低.

图1 环盘式牵引传动装置
Fig.1 Toroidal traction drive
尽管环盘式牵引传动在车辆上得到了广泛应用,但其也存在不足之处:环盘式结构决定了变速时需要采用较大的操纵力方能实现环-盘接触位置的调节,同时变速机构还需具备位置锁止功能,故而目前环盘式牵引传动多采用液压控制系统作为变速机构,而液压控制系统其组成元件较多,结构较为复杂,因此其很大程度上影响到了环盘式牵引传动的结构优化与工程应用[9]. 针对传统牵引传动变速机构复杂等缺点,德国GIF公司专门开发了锥环式牵引传动装置[10],如图2所示. 该装置具有变速机构简单、变速省力、轻便等突出优点,但是,关于其变速轻便、省力的机理目前尚未有文献报道. 基于此原因,本文作者针对锥环式牵引传动装置开展接触区油膜的运动与牵引力分析,研究其自助力变速机理,研究成果对揭示锥环式牵引传动变速规律、优化结构设计具有指导意义;同时,对其它形式牵引传动装置的变速机构设计也具有参考价值.
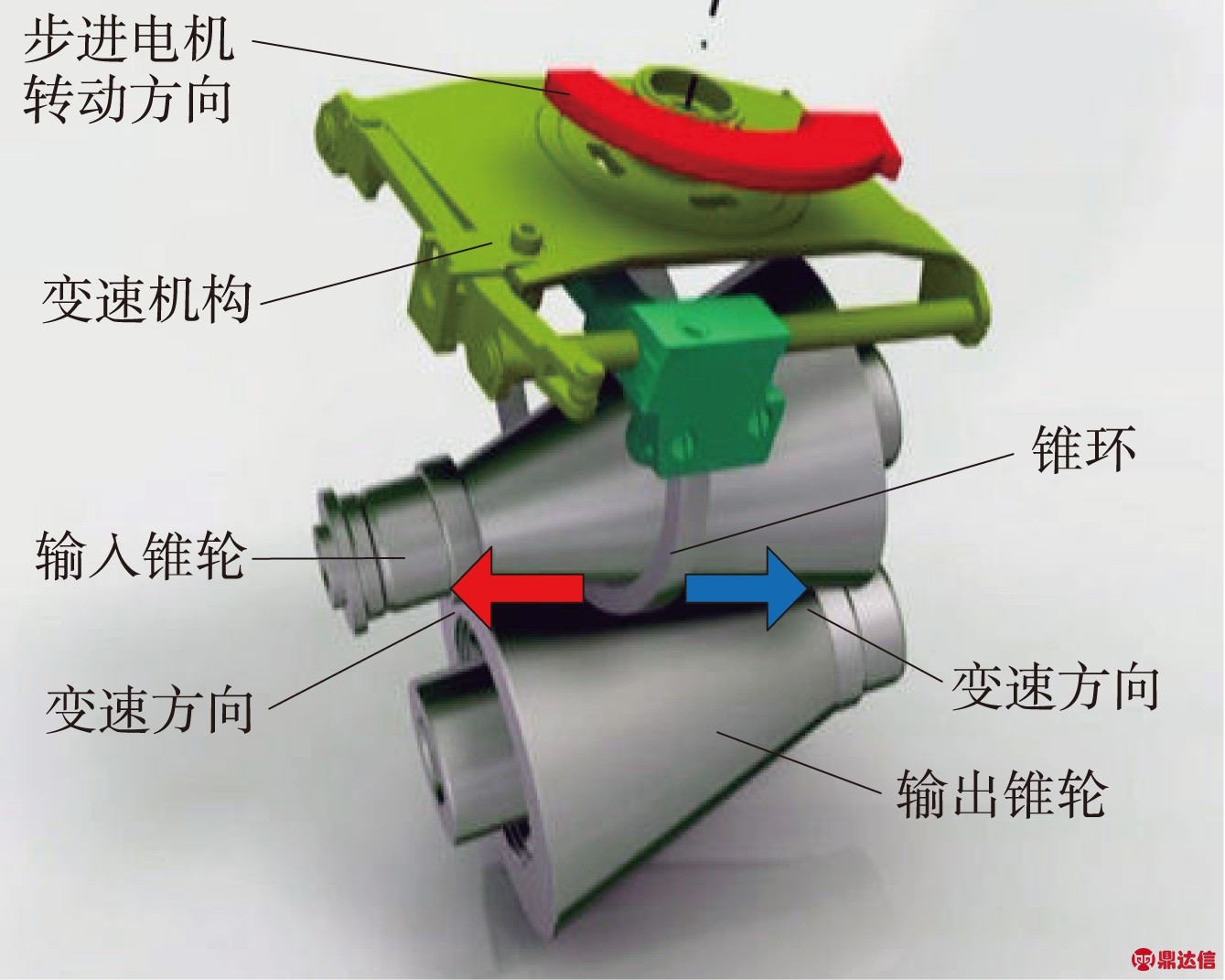
图2 锥环式牵引传动装置
Fig.2 Cone-ring traction drie
1 锥环式牵引传动牵引接触区运动分析
牵引传动是利用接触区油膜的黏性剪切力(牵引力)来传递动力的,油膜的黏性剪切力与接触区的油膜运动速度、膜厚以及压力分布等特性密切相关,因此接触区的运动分析是进行牵引力计算分析的前提.
1.1 稳定工况运动分析
稳定工况时,锥环所在平面与锥轮回转轴线垂直,此时锥环和锥轮的回转轴线相互平行. 为分析方便,在输入锥轮上建立坐标系O-xyz,锥环上建立坐标系O′-x′y′z′,如图3所示,Ox轴与O′x′轴均垂直于纸面向外,所有坐标系均满足右手定则. 同时,假设输入锥轮角速度ω1沿Oy轴正向,锥轮角速度为ω0,则可根据几何关系,获得接触点O′的内接触区速度图,如图4所示.
由图4可知,内接触区油膜的卷吸速度为
内接触区油膜的自旋角速度为

(1)
式中:u、v分别为油膜沿Ox′、Oy′方向的分速度;R为接触点O′处输入锥轮半径;R1为锥环半径;α为锥轮半角.
外接触区坐标系如图5所示. 根据几何关系可知,输出锥轮角速度ω2与输入锥轮角速度ω1方向相反. 同理可知外接触区油膜的卷吸速度为

式中R′为接触点O′处输出锥轮半径.
内接触区油膜的自旋角速度为
(2)
图3 内接触区坐标系位置示意图
Fig.3 Coordinate system of inner contact area
图4 左、右分别为输入锥轮、锥环上O′点速度示意图
Fig.4 Velocity of point O′on input cone and conic ring
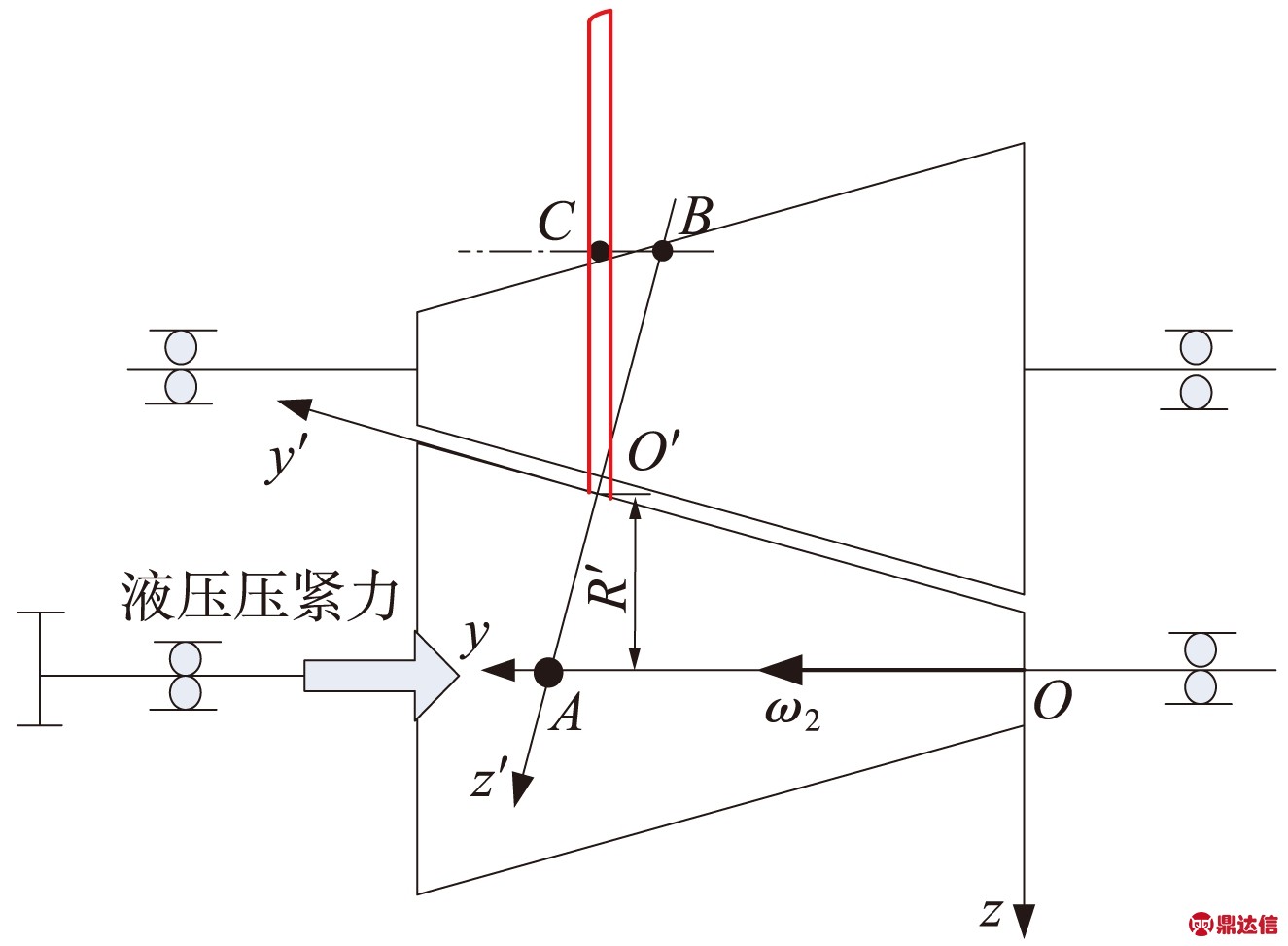
图5 外接触区坐标系位置示意图
Fig.5 Coordinate system of outer contact area
1.2 变速工况运动分析
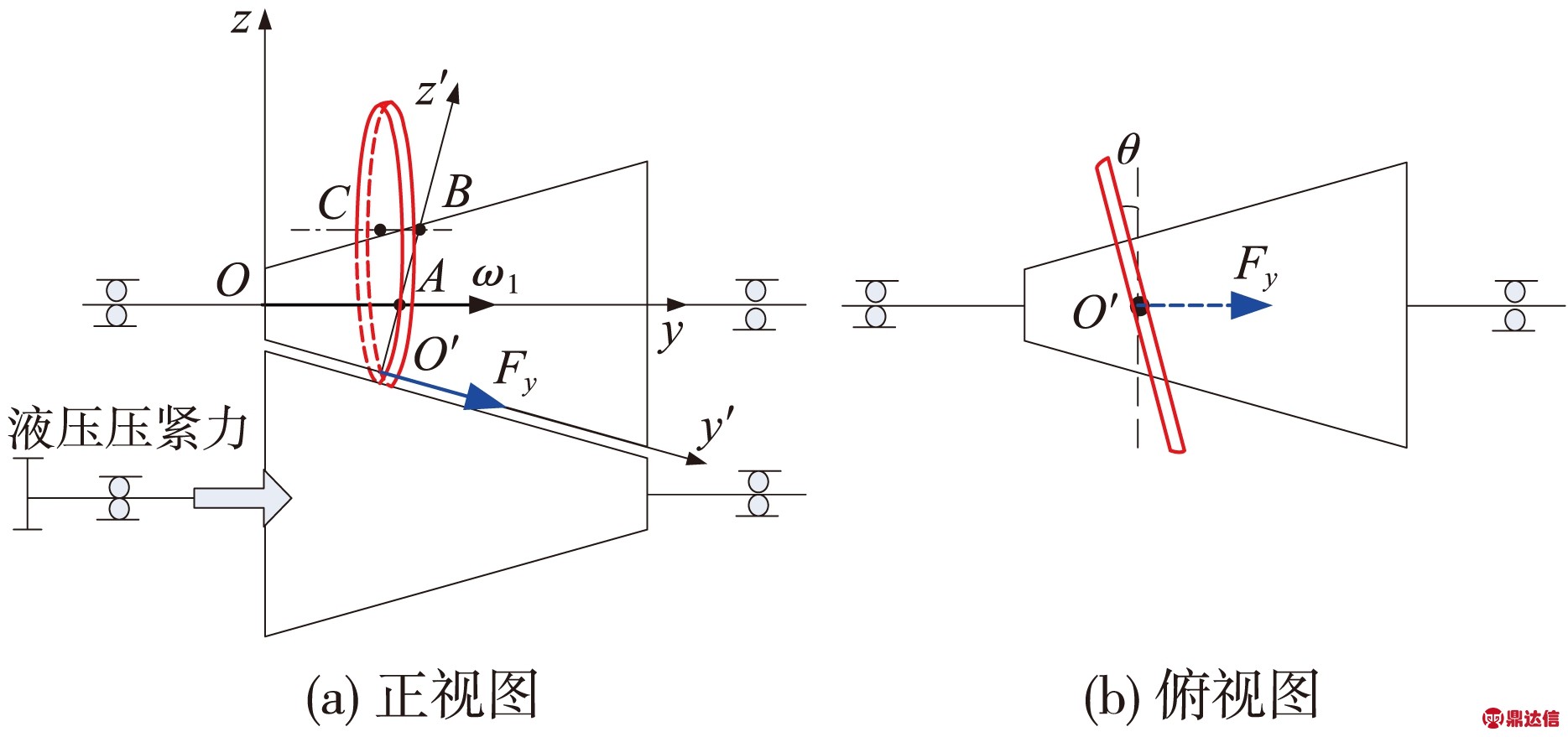
图6 变速工况下视图
Fig.6 Front view and top view of cone-ring traction drive under ratio change situation
变速工况时,锥环绕过接触点O′的铅垂线逆时针转过角度θ(θ为变速角),如图6所示. θ的存在使锥环产生沿锥轮母线方向(O′y′轴方向)的侧向速度v,在此速度作用下,接触区油膜产生沿锥轮母线方向(即变速方向)的牵引力Fy;Fy带动锥环沿锥轮母线方向运动,致使接触点处输入锥轮与输出锥轮半径改变,最终使得传动比发生变化,实现自助力变速.
1.2.1 接触点O′内接触区运动分析
接触区油膜的卷吸速度是由锥轮与锥环上接触点O′处速度决定的. 输入锥轮上O′点处速度如图7所示. 由图可知,输入锥轮上O′点处速度为
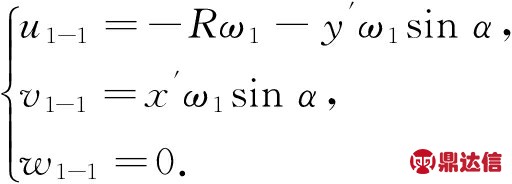
(3)

图7 输入锥轮上O′点处速度示意图
Fig.7 Velocity of point O′ on input cone
锥环上O′点处速度如图8所示. 由图可知,锥环上O′点处速度为
(4)
图8 锥环上O′点处速度示意图
Fig.8 Velocity of point O′ on conic ring
综上可知,接触点O′内接触区油膜卷吸速度为
(5)
内接触区油膜自旋角速度为

(6)
定义滑滚比为

(7)
通过分析可以看出,内接触区油膜处于三维运动状态,且侧向速度v沿Oy′轴负向.
1.2.2 接触点O′外接触区运动分析
外接触区坐标系如图8所示. 同内接触区分析方法,可知输入锥轮上O′点处速度为
(8)
锥环上O′点处速度为
(9)
接触点O′外接触区油膜卷吸速度为
(10)
外接触区油膜自旋角速度为

(11)
外接触区油膜侧向速度v也沿Oy′轴正向,即与内接触区油膜的侧向速度同向.
2 润滑模型
2.1 润滑控制方程
采用二维的Reynolds方程作为控制方程

(12)
式中:p为压力,Pa;h为膜厚,m;ρ为油液密度,kg/m3;η为油液黏度,Pa·s;u和v分别为沿x和y方向的卷吸速度,

(13)
式中u1、u2和v1、v2分别为锥轮、锥环表面沿x和y方向的卷吸速度.
式(12)的边界条件为
(14)
式中:下标in表示入口,out表示出口.
膜厚方程为
(15)
式中:h0为刚体中心膜厚;Rx和Ry为当量曲率半径;δ(x)为弹性变形量,且

黏度方程采用Roelands黏压关系式
(16)
式中:η0是环境黏度,A1=ln η0+9.67,A1=5.1×10-9(Pa-1),z=α/(A1A2),α为Barus黏压系数.
密度方程为
(17)
式中ρ0为环境密度.
载荷方程为
(18)
式中:S为接触区面积,w为集中外载荷.
2.2 变速方向的牵引力模型
对于流体膜,z方向的尺度比x和y方向的尺度小若干个数量级,因此,与速度梯度∂u/∂z和∂v/∂z相比较,其它速度梯度均为高阶小量,可以忽略不计[11].
根据文献[12],采用Erying流变模型. 那么,x和y方向上的切应变率分别为
(19)
式中:τzx为x方向上的切应力;τzy为y方向上的切应力;τe为油膜总切应力,
![]() ,
,
![]() ,
,
假设速度梯度∂u/∂z和∂v/∂z均是线性的,则非线性方程组(23)只包含两个未知数τzx和τzy,可以利用牛顿法求解.
因此,沿变速方向的牵引力为
(20)
3 结果与讨论
针对内接触区,采用多重网格法求解Reynolds方程,采用多重网格积分法求解弹性变形方程,计算升速工况下沿变速方向的牵引力. 计算中要用到的参数有锥轮小端半径r1=0.05 m;锥轮大端半径r2=0.125 m.
锥环半径R1=0.15 m;锥环断面半径R2=0.8 m;锥环半角为15°;材料参数为E1=E2=210 GPa,ν1=ν2=0.3;润滑油参数为η0=3.2 mPa·s,α=22 GPa-1.
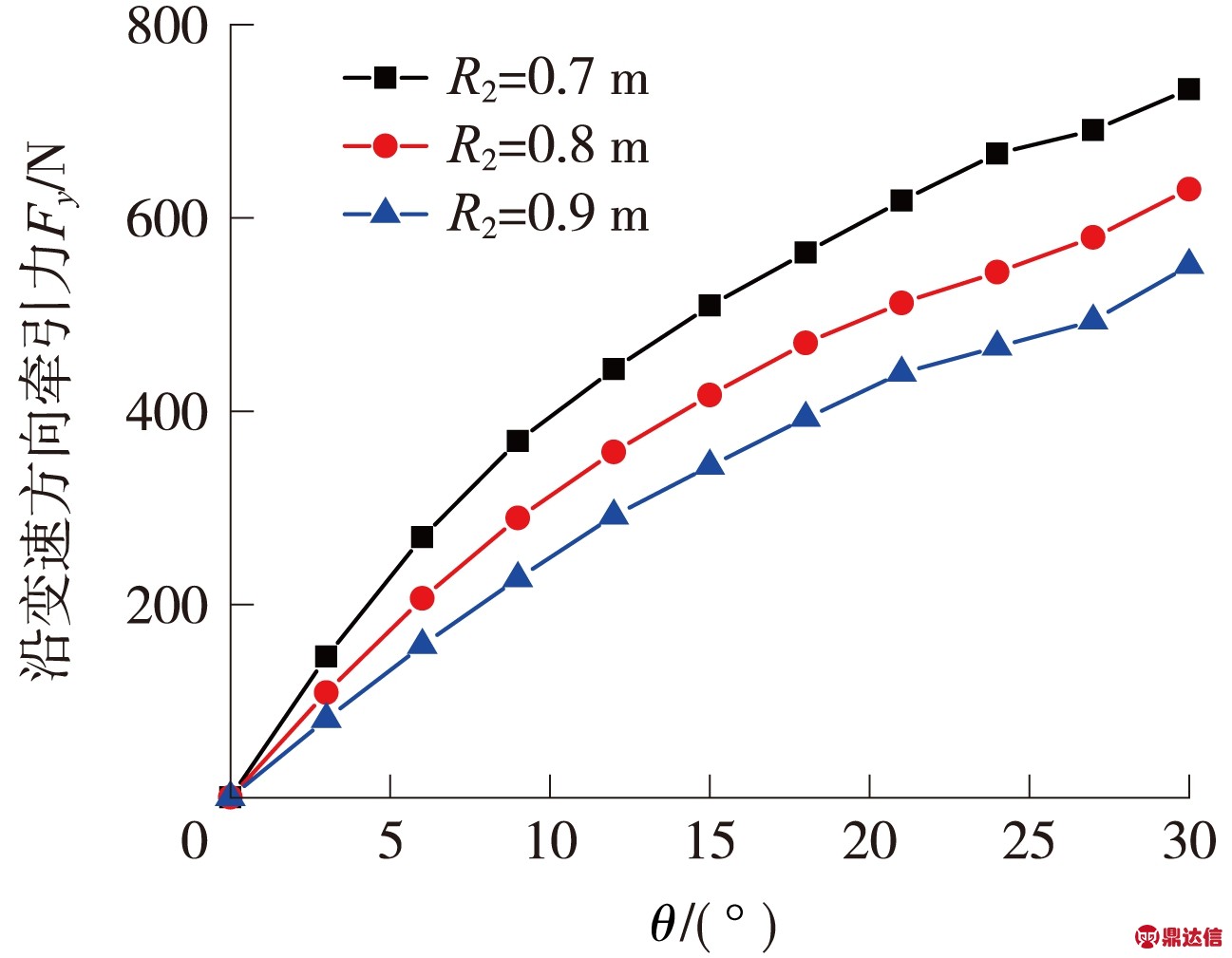
取接触区法向载荷为20 kN,输入锥轮的转速为3 000 r/min,锥环转速为1 450 r/min. 变速角度θ和滑滚比s对沿变速方向牵引力Fy的影响分别如图9~图10所示.
图9 不同θ角下沿变速方向的牵引力
Fig.9 Traction along DoRC under different θ
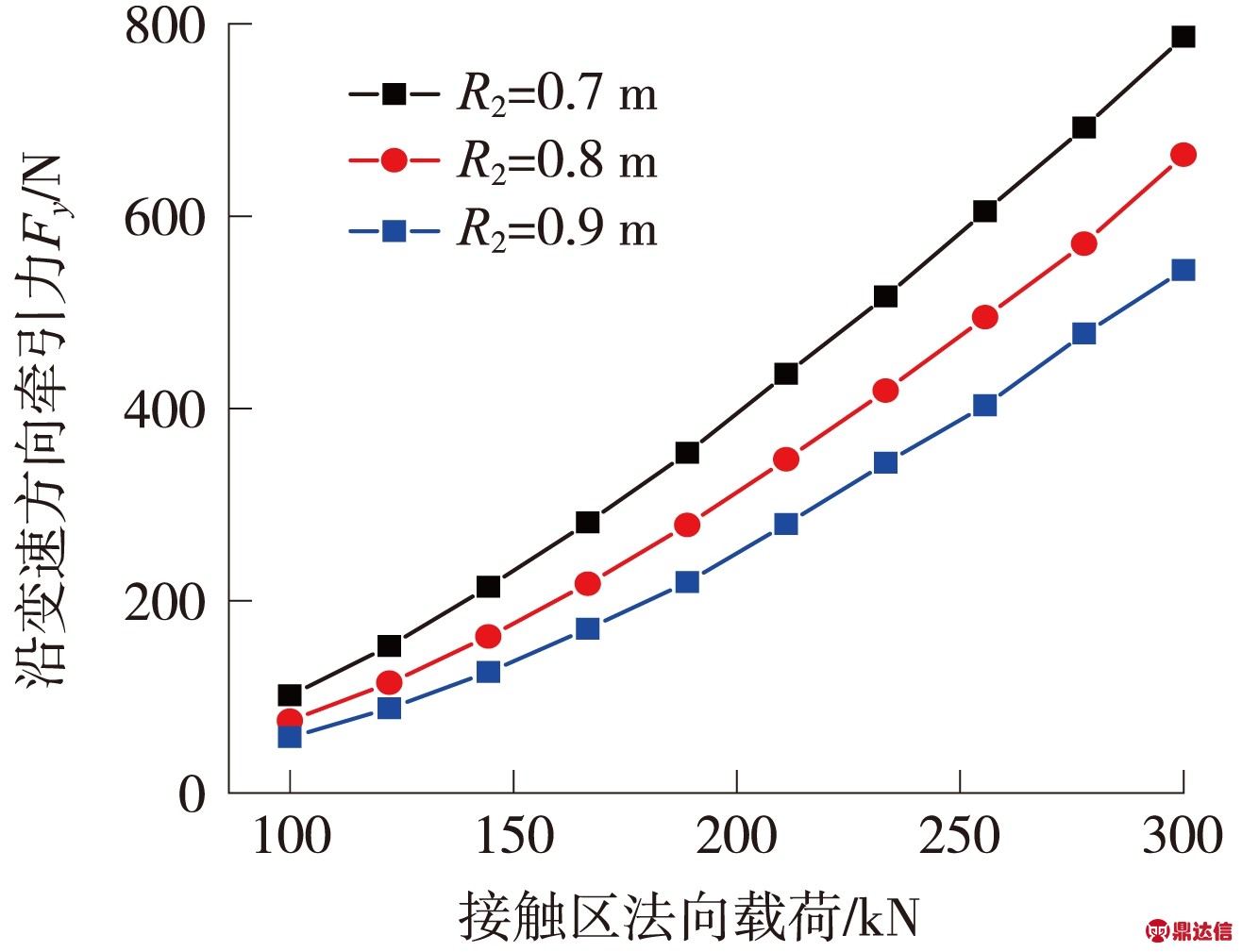
图10 不同滑滚比s下沿变速方向的牵引力
Fig.10 Traction along DoRC under different s
从图9中可以看出,随着θ角的增大,Fy也随之增大,但增大的速率逐渐减缓;另外,锥环尺寸R2越大,Fy反而越小. 由式(3)~(5)可知,侧向速度v与θ角呈正弦变化,即θ角增大时,油膜的侧向速度v增大,侧向速度梯度∂v/∂z也逐渐增大,且θ角越大,v的增长速率越小,∂v/∂z增长速率也越小. 同时,由式(19)和(20)可以得到,随着剪应变率的增大,沿y方向上的切应力τzy也随之增加,进而增大了沿变速方向的牵引力Fy,且其增大速率随θ角的增大而减小.
从图10中可以看出,随着滑滚比s的增大,Fy反而减小,最后趋于0;另外,锥环尺寸R2越大,Fy反而越小. 由式(7)可知,当输入锥轮角速度ω1保持不变时,随着滑滚比s的增大,锥环角速度ω0逐渐减小,从而根据式(4)可得,锥环上O′点处沿y方向的速度v0-1减小,逐渐接近于0. 同时,通过前面分析可以知道,锥轮上O′点处沿y方向的速度v1-1也接近于0,因此速度梯度∂v/∂z减小,且随着滑滚比s的增大逐渐接近于0,其使得沿变速方向的牵引力Fy也随滑滚比s的增大逐渐减小并趋于0.
取变速角度θ=100,滑滚比s=0.1. 输入锥轮转速和接触载荷对沿变速方向牵引力Fy的影响分别如图11~图12所示.
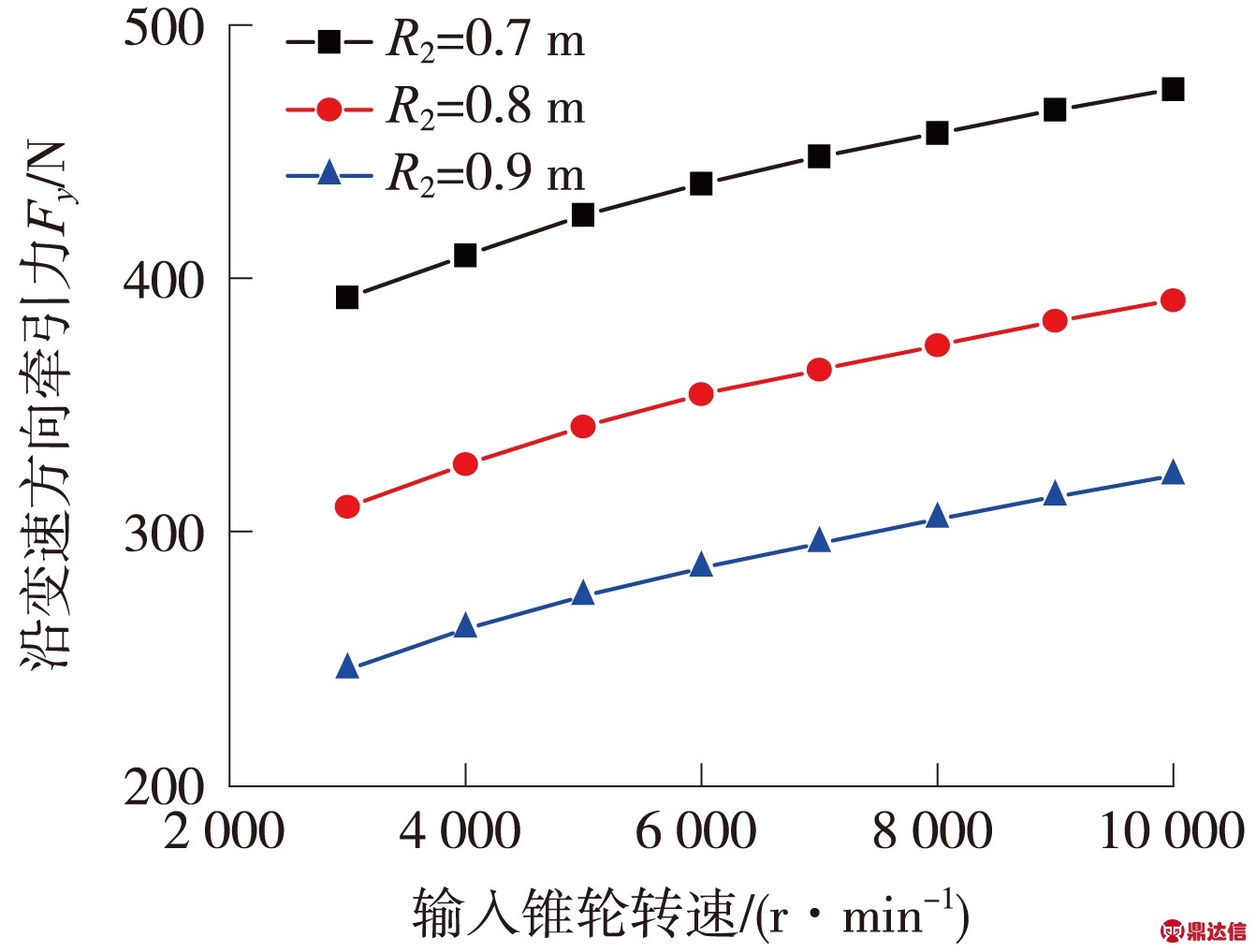
图11 不同输入锥轮转速下沿变速方向的牵引力
Fig.11 Traction along DoRC under different input velocity
图12 不同接触载荷下沿变速方向的牵引力
Fig.12 Traction along DoRC under different contact load
从图11中可以看出,输入锥轮转速越高,Fy也越大,且二者之间呈近似线性关系;另外,锥环尺寸R2越大,Fy反而越小. 由式(7)可知,当输入锥轮转速增大,即ω1增大时,由于滑滚比s是定值,所以锥环角速度ω0逐渐增大;根据式(3)和(4),锥轮与锥环上O′点处速度均增大,且锥环上O′点处沿y方向的速度v0-1增大的幅度远大于锥轮上O′点处速度v1-1,故侧向速度梯度∂v/∂z逐渐增大. 因此,沿变速方向的牵引力Fy随输入锥轮转速的增大而增大.
从图12中可以看出,随着接触区法向载荷的增大,Fy也逐渐增大,且速率也逐渐增大;另外,锥环尺寸R2越大,Fy反而越小. 当接触区法向载荷增大时,油膜压力增大,从而使得油液黏度急剧增加,因此油膜沿y方向上的切应力τzy增大,致使Fy也随之增大.
另外,从图9~图12还可看出:锥环尺寸R2越大,Fy反而越小. 这是因为:当R2增大时,接触区接触面积增大,油膜压力减小,导致油液黏度降低,因此油膜沿y方向上的切应力也τzy减小,从而致使Fy逐渐减小.
4 结 论
变速时,由于变速角θ的存在,其使得接触区油膜存在沿锥轮母线方向的侧向速度,从而在接触区产生沿变速方向的牵引力Fy,在此力的作用下,锥环将沿变速方向运动,实现自助力变速.
随着变速角θ的增大,沿变速方向牵引力Fy也随之增大,但增大的速率逐渐减缓;故变速角θ越大,变速越省力.
随着滑滚比s的增大,沿变速方向牵引力Fy反而减小,最后趋于0;故滑滚比s越小,变速越省力.
输入锥轮转速与沿变速方向牵引力Fy之间、接触载荷与沿变速方向牵引力Fy之间均呈近似线性递增关系;输入锥轮转速越高、接触载荷越大,变速越省力.


